基于ARM-Linux的电子控制油门设计

摘要:传统的油门通过右脚进行机械控制,并且刹车也用右脚控制。在紧急情况时,刹车踏在油门的事故时有发生。传统油门通过机械传导,结构较为复杂,增加成本。电子油门控制系统通过指令控制执行部分——舵机来控制油门的开度,实现发动机油门开度的精确控制。与此同时,通过节气门开度传感器,此设计可以从显示部分得知油门的实际开度,并有利于新驾驶员驾驶,避免半途熄火的危险驾驶。汽车可按选定的速度稳定行驶,无需驾驶员反复调节节气门开度。
关键词:油门;S3C2410;Linux设备驱动;舵机;控制;S3003
引言
巡航控制系统(CCS)是20世纪60年代发展起来的,又称为恒速行驶系统。巡航控制系统工作时,ECU根据各种传感器输送来的信号判断汽车的运行状况,通过执行元件自动调节节气门的开度使汽车的行驶速度与设定的车速保持一致。汽车在良好路面上长时间行驶时,驾驶员启动巡航控制系统并设定行驶速度,不需驾驶员操纵加速踏板,通过巡航控制系统即可自动保持既定的行驶速度,不仅减轻了驾驶员的劳动强度,同时利用先进的电子控制技术控制节气门的开度,比驾驶员操纵节气门更精确,汽车燃料经济性、排放污染性也可得到改善。
1 系统原理
1.1 电控油门原理
工作时,由驾驶员发出转速的控制指令,由节气门开度传感器采集发动机的转速参数,并把信号输入电控单元;电控单元将控制信号和反馈的节气门位置信号进行比较,根据比较的结果来驱动执行器改变节气门的开度,使实际的开度与控制开度达到一致,从而实现车速的自动控制。
1.2 舵机控制原理
舵机是一种位置(角度)伺服驱动器,适用于那些角度需要不断变化并可以保持的系统。S3003型舵机有3个引脚,分别为电源Vcc、地GND和控制线Signal。控制信号由Signal通道进入信号调制芯片,获得直流偏置电压。它的内部有一个基准电路,产生周期为20 ms、宽度为1.5 ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片以决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
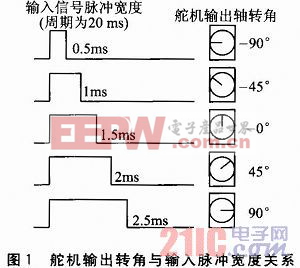
控制线的输入是一个宽度可调的周期性方波脉冲信号,方波脉冲信号的周期为20 ms(即频率为50 Hz)。当方波的脉冲宽度改变时,舵机的角度发生改变,角度变化与脉冲宽度成正比。其输出轴转角与输入脉冲宽度关系如图1所示。
2 系统设计
本系统采用三星公司的S3C2410和Futaba公司的S3003型舵机分别作为控制器和执行器,使用Linux操作系统,实验平台为济南恒信有限公司的发动机实验平台。











评论