基于Delphi的室内多目标超声波定位系统设计

本系统利用超声波对多个目标测距,采用TOA修正算法对数据进行处理,上位机以Delphi为开发平台,完成了对室内小范围的超声波定位,可实现对多个目标位置的实时显示。测量精度高,抗干扰强,同时有不受被定位物体形状、材料限制等优点。可应用于小范围移动目标的位置测定或导航,如室内小动物的跟踪,研究掌握其生活习性等。
本文引用地址:https://www.eepw.com.cn/article/123971.htm系统工作原理
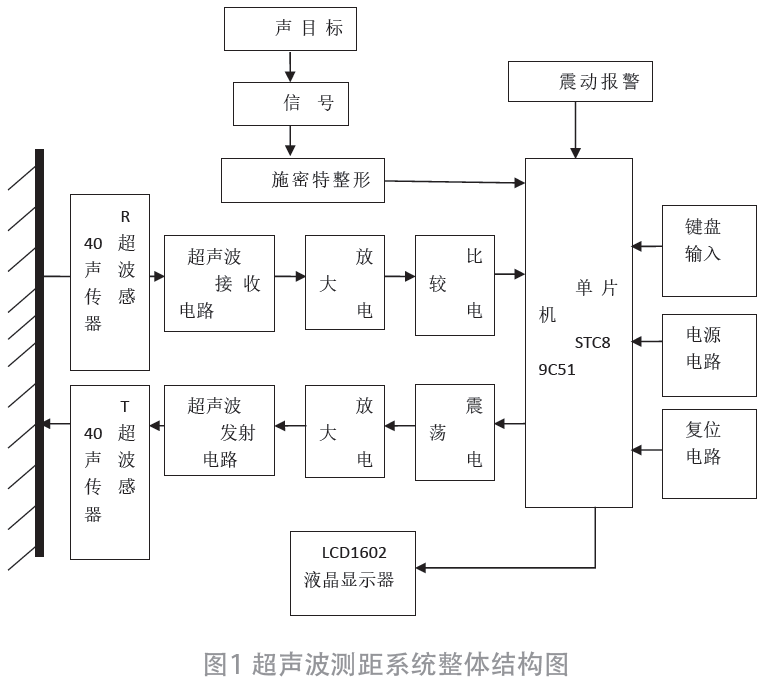
系统由上位机,下位机,红外发射模块,超声波接收模块以及超声波发射模块组成,其中被定位物体上有超声波发射模块与红外接收模块结构框图如图1所示。
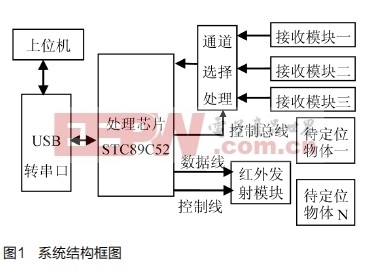
下位机(单片机)与上位机(微机)通过USB转串口模块(PL2303)相连,上位机通过串口向下位机发送被定位物体的地址编号。数据经下位机传入红外发射模块触发相应待定位物体。被选中物体接收到触发信号立即发射超声波,三个超声波接收模块经通道选择电路与处理芯片相连,每次只有一个超声波模块与处理芯片联通。其中通道选择电路由门电路组成,控制总线则为单片机的几个I/O口,控制通道开关。最后,下位机将超声波传播的时间通过串口发回上位机处理。
系统软件设计
定位算法
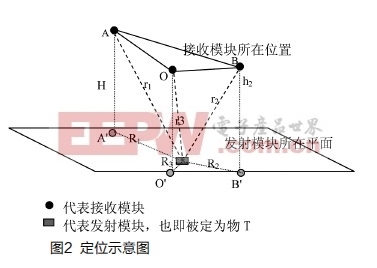
首先,需要将立体问题转化到二维平面上以方便计算。ABO三个超声波接收头及待定位物体情况如图2所示。三个接收头放在距地面高为H,形状为等边直角三角形。结合单片机定时器发回的三个时间以及声速,可分别确定距离r1 、r2和r3。r=v*t。 已知高度H,通过勾股定理分别算出投影R1,R2,R3。平面图如图3所示。至此,问题转化为已知∆A'B'O',R1、R2和R3,定位T(X,Y)的坐标。
(1)TOA基本算法
主流的定位算法主要有四种:基于到达时间(TOA)的方法、基于到达时间差(TDOA)的方法、基于到达角度(AOA) 的方法和基于接收信号强度(RSSI)的方法。结合本系统的定位原理,已知声速和超声波传播的时间,可利用基于TOA的三边测量法解得点T的坐标。但实际中由于超声波接收头精度问题,出现误差则三圆无法交于一点,造成定位失败。此外,此基础上的Caffery 算法编程难度较大,运算量大,难以符合本系统实时多目标定位的要求。
(2)TOA修正算法
多方面对比,考虑到三边测量法的公式由于不是线性,所以求解并不容易,利用海伦公式解三角形法成为一种比较优化的算法。该方法避免了冗长的方程推导,简洁的利用各个三角和测距的关系,完成了定位。在∆A'OT中,周长已知,其面积S1由以下海伦公式得出。











评论