I2C总线通信技术在球形机器人双DSP控制系统中的应用
 加入技术交流群
加入技术交流群

扫码加入
和技术大咖面对面交流
海量资料库查询
球形机器人控制系统的整体架构
本文引用地址:https://www.eepw.com.cn/article/116960.htm笔者所在科研团队新近研制了一种新型球形机器人,该机器人能自动扫描和跟踪目标,并可根据图像传感器采集到的数据自主对目标进行识别和判断,属于典型的机器视觉和运动控制相互协调、并行工作的系统。在搭建该球形机器人控制系统时,笔者采用了DSP C6000+C2000的双核架构。其中,C6000芯片主要用来对采集的现场图像信息进行分析和处理,完成目标识别和判断,并输出处理结果;C2000芯片主要用来接收C6000芯片的处理结果,并完成相应的任务管理,如视觉系统云台的扫描运动、防御功能的实现等等。该机器人控制系统的硬件结构如图1所示。
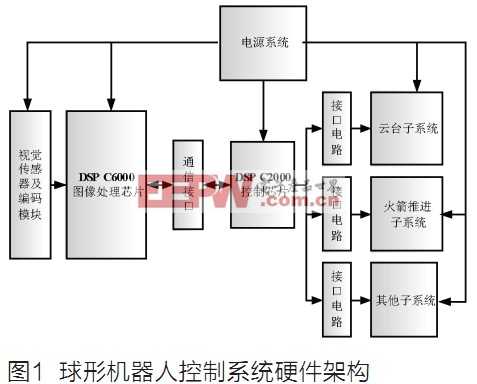
在C6000芯片的选型上,选择了TMS320DM6437(以下简称DM6437)芯片,它是目前TI公司的TMS320C6000系列中性能较好的定点DSP之一。在C2000芯片的选择上,选择了TMS320F28015(以下简称F28015)芯片,它是TI公司推出的低成本,低功耗,基于TMS320C28x内核的定点控制器芯片。
DSP C6000+C2000的组合架构形式,既解决了C6000控制能力稍显不足的问题,又克服了C2000图像处理功能薄弱的缺点,可以最大程度地满足球形机器人控制系统在综合性能上的需求。但是,引入了强大的双DSP系统后,随之而来的便是两者之间的通信问题,若处理不好,反而会适得其反。因此,双DSP芯片间的通信接口的设计是保证整体机器人控制系统能完成高效协调工作的关键所在。
球形机器人控制系统双处理器通信接口方案的选择
笔者在研究过程中曾仔细分析过双DSP架构的硬件结构,发现C6000与C2000硬连接的接口方式可以多种多样,如串口(UART)连接、USB连接、以太网(Ethernet)连接、HPI并行连接、I2C总线连接等。这些方式各有优缺点和各自的适应场合,须考虑自身功能和外部环境的需求来合理选择。表1给出了上述几种信号传输接口的各自性能比较。
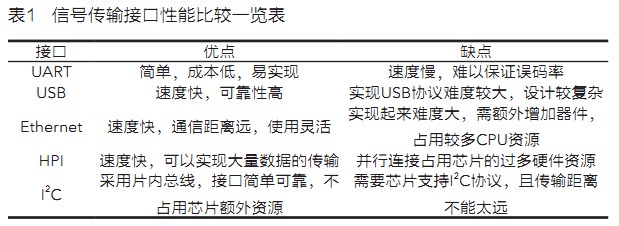
从表1中可以看出,I2C为片内总线接口,其接口连接简单可靠,非常适合于短距离高效通信。注意到DM6437和F28015片上都拥有I2C模块,且将双DSP做在同一块PCB板上可以大大减小控制板卡的尺寸,降低电磁干扰,提高整个系统的可靠性。采用这样的硬件设计思路后,片内总线就应该成为首选的通信方式了。而I2C通信是一种很简捷高效的片内总线,其不占用芯片额外资源,除了通信可靠性高外,该接口的硬件设计难度也较小,因此,新型球形机器人控制系统最终确定I2C接口为双DSP的通信接口方式。
球形机器人控制系统的接口设计
I2C总线介绍
I2C总线(Inter IC Bus)是一种用于IC器件之间连接的二进制总线。它通过SDA(串行数据线)及SCI(并行时钟线)两根线,在连到总线上的器件之间传送数据。它根据地址识别每个支持I2C接口的器件。











评论