用感应器对BLDC电动机进行磁场定向控制

电动机可分为三大类,分别是AC、DC和通用型。顾名思义,AC电动机使用AC电源运行,而DC电动机则使用DC电源运行。通用型电动机可同时支持AC和DC电源。AC电动机包括AC感应电动机和鼠笼式电动机,其还可进一步细分为单相和多相电动机。而DC电动机则包括有刷DC电动机、无刷DC电动机(BLDC)和步进电动机。
现有的电动机控制/驱动技术:
相对于AC电动机驱动而言,DC电动机驱动比较易于实施。DC电动机可直接通过电压—频率(V/F)驱动;即应用电压越高,频率或速度就越高。这种驱动通常实施于有刷DC电动机。
就AC电动机驱动和某些控制器将应用DC转化为AC来驱动电动机的设备(如BLDC或PMSM)而言,我们要采用复杂的驱动算法顺序改变线圈电流方向,从而实现所需的转动方向。线圈转动的速度同电动机的运行速度成正比。我们可使用以下不同的算法:
梯形控制:也称作六步控制法。这是一种最简单的算法。这六个转换步骤中的每一步都会在一对线圈之间形成电流路径,让第三个线圈断连。这种办法会产生较高转矩波动,导致震动和噪声,相对于其他算法的性能而言比较差。
正弦控制:也称作电压超频整流。通过对3个线圈平稳提供(正弦)可变电流,正弦控制能解决梯形控制涉及的很多问题,从而降低转矩波动,实现平稳的转动。时变电流可用基本PI调节器进行控制,不过这在较高速率情况下会导致性能降低。
磁场定向控制(FOC):也称作矢量控制法。FOC相对于正弦控制而言能在更高速率情况下提高效率。此外,这种方法即便在瞬态操作期间也能确保效率优化,完美保持定子和转子的流量。相对于其他所有技术而言,FOC还能就动态负载变化提供更好的性能。
什么是磁场定向控制?
磁场定向控制是变频驱动或变速驱动领域使用的一种方法,可通过控制电流来控制三相AC电动机的扭矩(进而控制速度)。利用FOC技术,我们能独立控制扭矩和流量。FOC法可加快动态响应速度,超出洗衣机等应用的要求。该方法还可避免转矩波动问题,无论速度高低FOC法都能实现更加平滑准确的电动机控制。
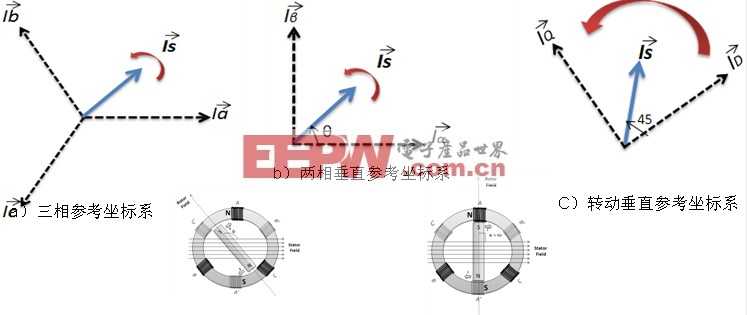
当定子和转子的磁场垂直时,感应电动机的扭矩最大。就FOC而言,我们检测并调节定子电流,从而让转子和定子流量之间的角度为 90度,以实现最大扭矩(如下图所示):
FOC工作在三相电流的合成矢量上,而不是分别独立控制每一个相。AC感应电动机的控制变量通过数学转换固定(DC)。这样,FOC就能和处理固定参数一样,通过模仿DC电动机的工作来控制电感电动机。
FOC使用的方法有两种。一种是直接FOC,转子流量角度直接通过流量估算或测量进行计算。另一种是间接FOC,转子流量角度间接通过可用速度和滑移计算得出。
涉及感应器FOC的步骤如下:
Ia + Ib + Ic = 0
第一步:
检测三个定子相电流中的两个,第三个电流则用Kirchoff电流关系确定:
Ia + Ib + Ic = 0
其中,Ia、Ib和Ic为相电流。
(Ia, Ib, Ic) ![]() (Iα, Iβ)
(Iα, Iβ)
第二步:
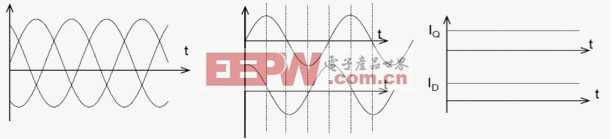
三个相电流从定子三轴系统通过克拉克转换变为双轴坐标系统:
(Ia, Ib, Ic) ![]() (Iα, Iβ)
(Iα, Iβ)
其中,Iα和β是转化为双轴坐标系统的定子电流。
(Iα, Iβ)![]() (Id, Iq)
(Id, Iq)
第三步:
有关元素和双轴定子电流本身具有时变属性,用传统的PI跟踪相当复杂。因此,我们根据转子位置(通过感应器或back EMF确定)让固定参考变为转动参考,其中轴元素保持常量,这样就能用传统PI控制器来抵消误差。转动通过帕克转换完成:
其中,Id和Iq从转子角度而言是相内和正交相定子电流。
第四步:
一旦矢量失去时变性,我们就能比较相应的轴矢量和参考,并就每个轴用PI控制器(见以下方程式)来确定误差校正信号。Id参考控制转子磁化通量。Iq参考则控制电动机的扭矩输出。
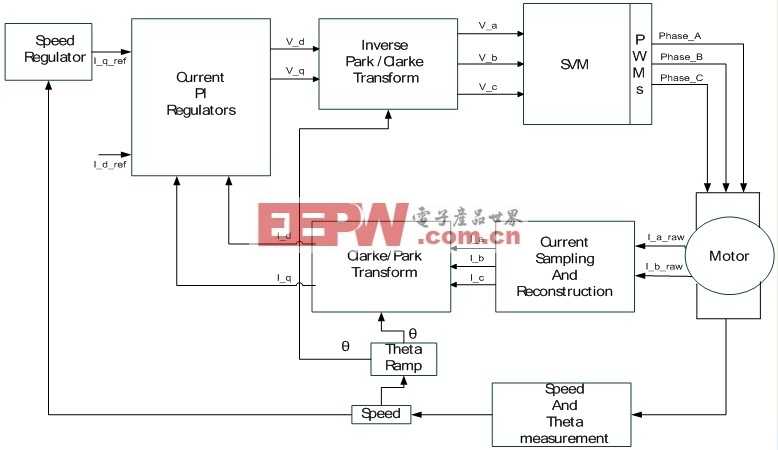
第五步:
PI控制器的相应输出随后可通过逆变帕克和克拉克转换传递,转变回3相定子参考。
第六步:
生成3相参考信号后,我们再用空间矢量调制(SVM)来调制PWM。

电动机相关文章:电动机工作原理设计
霍尔传感器相关文章:霍尔传感器工作原理
霍尔传感器相关文章:霍尔传感器原理 矢量控制相关文章:矢量控制原理










评论