基于视觉传感器的智能车摄像头标定技术研究(上)

引言
本文引用地址:https://www.eepw.com.cn/article/110158.htm本文以飞思卡尔智能车大赛为背景,使用飞思卡尔(Freeseale)生产的16位微控制器MC9S12XS128作为控制核心,制作一个能巡线快速行驶的摄像头小车。由于摄像头光轴与地面呈一定夹角,于是其成像存在梯形失真;为了扩大视野,广角镜头越来越为很多队伍所采用,于是又存在桶形失真。这两种失真,是每个采用广角镜头的摄像头队伍都要遇到的问题。很多队伍都回避这个问题,直接采用图像预处理后的像素点进行控制。但若将像素点转换为实际物理坐标,无疑更直观,对程序的编写或建模带来很大的方便,并且本文提出的这个方法,可有效解决这两种失真,实际操作并不复杂。
各队解决方案综述
文献[1]提出的方法是:可以通过对于每行提取的道路位置通过一个线性修正来消除梯形失真,可通过实验的方式确定线性补偿的系数。但是该实验方法比较繁杂,并且不能消除桶形失真。
文献[2]制作了一个图像标定板,如图1所示。
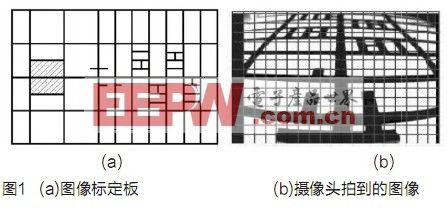
其原理是:图1(a)中阴影部分是车体放置的位置。在标定板上等间距地贴了许多黑线,给标定板拍照后,就可以知道实际中的位置与图像中的位置的相互关系。这个方法由于黑线有一定宽度,所以会存在较大误差。
文献[3]采用非均行采集的方案。所谓非均行采集是与均行采集对应的。在均行采集中,AD模块所采集的行均匀分布于摄像头输出的图像中。而非均行采集则是指,AD模块所采集的行按某种规则非均匀地分布在原始图像中,而这种规则是保证采集得到的图像在纵向上(小车中轴方向)与现实景物不畸变。然后再确定每一行的横向畸变系数。
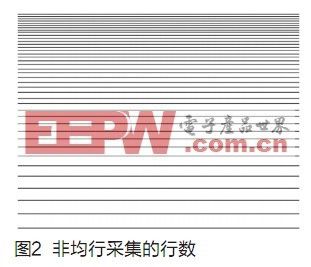
如图2所示,非均行采集时,远处采得密,近处采得稀。由于摄像头安装方式在实验时会经常变动,以确定最佳俯角和最佳高度,每当变动就需要重新标定。这个方案就不大方便了。文献[4]建立了一个光路几何模型图,如图3所示。

实验方案:量取摄像头架固定螺钉的高度H与摄像头中心相对于竖直杆的偏转角度(俯角)θ。由于光学中心的计算完全由这两个数据及近端距固定杆的距离S(即测量保险杠距固定杆的距离S0和近端距保险杠距离S'相加得到,也可直接在实验板上测量由近端黑线到摄像头固定杆的距离S)确定,因此要做到越精确越好。由O点做垂线长度为H至点A,做水平线AB,截取AD长为S,DB过O点做与垂直线成θ的射线交AB于C,过D做DE垂直于OC,并使OC为DE的垂直平分线,连接BE并延长,交OC与O’,则O’为光学中心。从图上能算得O’距底边距离为H’,俯角不变。

传感器相关文章:传感器工作原理
风速传感器相关文章:风速传感器原理 摄像头相关文章:摄像头原理


















评论