基于视觉传感器的智能车摄像头标定技术研究(上)
本文引用地址:http://www.eepw.com.cn/article/110158.htm
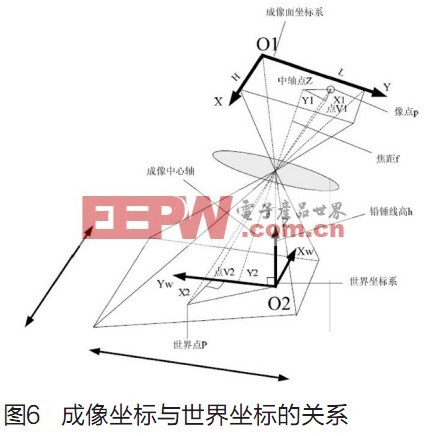
坐标变换关系如下:
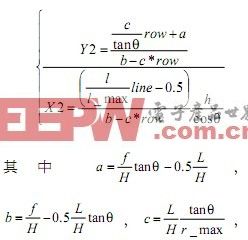
在摄像头安装固定后,c/tanθ、a、b、c、h 和h/cosθ 均为常量。这个方法还是比较好的,但是需要知道f、L、H,这三个参数厂家会提供,但不一定准确,θ也较难准确测量,且不能解决桶形失真的问题。(未完待续)
参考文献:
[1]卓晴,黄开胜,邵贝贝等. 学做智能车[M].北京:北京航空航天大学出版社,2007:17.
[2]谌彤,童周力,张文超. 国防科技大学“红旗Ⅰ”队技术报告[R].2008:53-55.
[3]杨树峰、王潇杨、李国洪. 东北大学“猎豹”队技术报告[R].2009:23-26.
[4]赵祥磊,吴颖熹,雷典. 吉林大学“爱德”队技术报告[R].2009:附录A 1-4.
[5]刘运银,刘帅,洪长志. 合肥学院“突击”队技术报告[R].2009:53-54.
[6]陈易厅,苏文友,关振明. 华南理工大学“急速”队技术报告[R].2009:22-23.
[7]胡晨晖,陆佳南,陈立刚. 上海交通大学“CyberSmart”队技术报告[R].2007:90-92.
[8]冯培悌. 系统辨识(第二版)[M].杭州: 浙江大学出版社,2004:56-58.
[9]汪国有,俞立科,张天序. 一种新的大视场景象的几何失真校正方法[J]. 数据采集与处理,1996,11(2):112-115.

传感器相关文章:传感器工作原理
风速传感器相关文章:风速传感器原理 摄像头相关文章:摄像头原理



















评论