- 韩国智能模型车竞赛是韩国汉阳大学举办的以单片机控制为核心的可以自行寻迹行驶、以速度快慢为主要评判指标的大学生课外科技竞赛,国内也将举办此类比赛。为了帮助参赛队伍更好地认识智能模型车的特点,提高参赛队伍水平,本文针对2005年韩国大学生智能模型车竞赛的16支队伍的技术方案,对电源管理、路径识别、电机驱动、转向控制、车速传感等硬件结构及软件控制特点进行了分析,对智能模型车的设计提出了建议。
- 关键字:
飞思卡尔 智能车 传感技术 电源管理模块 光电传感器 道路自动识别 单片机
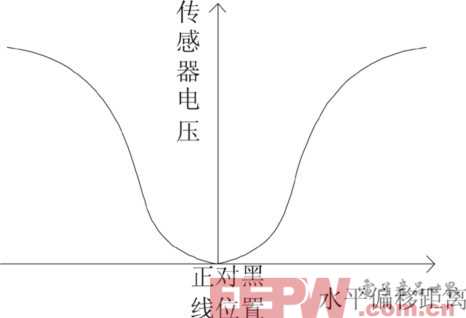
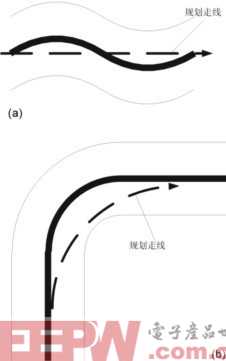
- 基于间隔布置光电传感器的离散路径识别算法是无人车最简单的路径识别算法之一,容易造成转向及车速调节的阶跃式变化,使得控制不佳。本文在对光电传感器特性研究的基础上,提出了一种基于间隔布置红外光电传感器的连续路径偏差识别算法,得到的路径信息是车身纵轴线偏移路径标记线的距离,消除了传感器间隙的“盲区”, 为控制的流畅性提供了可能。
- 关键字:
飞思卡尔 智能车 无人车 导航 光电传感 路径识别
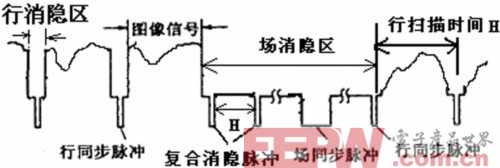
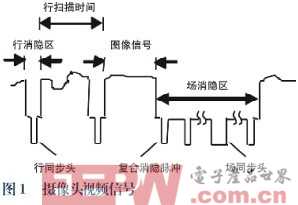
- 要实现一个完整的基于摄像头的智能小车,第一步要做的就是将摄像头输出的模拟信号通过单片机AD转换采集到单片机中,然后对采集到的原始的图像数据进行处理,以获取赛道中央的黑线在图像坐标系中的位置。
接着,就要利用处理得到的图象信息对智能小车进行控制。就目前而言,各参赛队用的最多的横向控制(转向控制)就是PID控制。采用PID控制方式,无需对摄像头作严格的标定,因为只须将黑线在图像坐标系中的位置偏差乘相应的PID系数,就可以作为转向的控制律,至于PID系数取多少,则可以通过简单的实验调试而获得合适的取值
- 关键字:
飞思卡尔 智能车 传感技术 摄像头
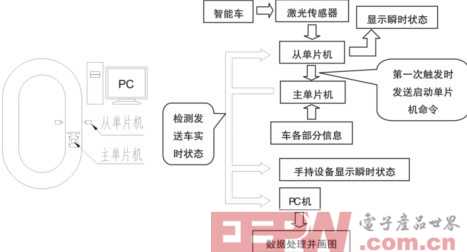
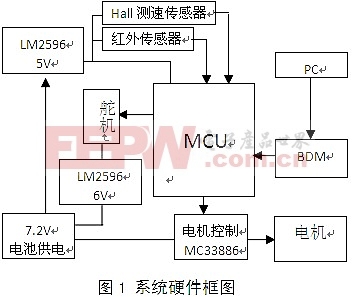
- 系统功能及应用
本系统主要完成将智能车行驶过程中的各种状态信息(如传感器亮灭,车速,舵机转角,电池电量等)实时地以无线串行通信方式发送至上位机处理,并绘制各部分状态值关于时间的曲线。有了这些曲线就不难看出智能车在赛道各个位置的状态,各种控制参数的优劣便一目了然了。尤为重要的是对于电机控制PID参数的选取,通过速度—时间曲线可以很容易发现各套PID参数之间的差异。对于采用CCD传感器的队伍来说,该系统便成为了调试者的眼睛,可以见智能车之所见,相信对编写循线算法有很大帮助。而且还可以对这
- 关键字:
飞思卡尔 智能车 传感技术 车载数据采集系统 无线数传系统 上位机数据处理系统
- 在去年的Freescale全国大学生智能车大赛中,赛道信息检测方案总体上有两大类:光电传感器方案和摄像头方案。前者电路设计简单、信息检测频率高,但检测范围、精度有限且能耗较大;后者获取的赛道信息丰富,但电路设计和软件处理较复杂,且信息更新速度较慢。在比较了两种方案的特点并实际测试后,我们选择了摄像头方案。本文将在获得摄像头采集数据的前提下,讨论如何对数据进行处理和控制策略的实现。
数据采集
我们选择了一款1/3?OmniVision?CMOS摄像头,用LM1881进行信号分离,结合AD采样
- 关键字:
飞思卡尔 智能车 传感技术 CMOS 摄像头
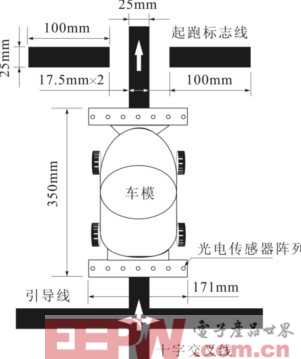
- 由于智能车模要在黑色引导线的识别过程中跑完全程,所以采用的寻线传感器主要是光学传感器。为了实现车模的记忆路况算法,首先要求车模系统能够识别起跑线,并区别于十字交叉线,本文介绍了车模系统识别起跑线的红外光电传感器的布局模型和设计。
- 关键字:
飞思卡尔 智能车 红外光电传感器 巡线算法 起跑线 引导线
- 引言
按照第一届全国大学生“飞思卡尔”智能车大赛比赛规则要求:使用大赛组委会统一提供的竞赛车模,采用飞思卡尔16 位微控制器MC9S12DG128 作为核心控制单元,自主构思控制方案及系统设计,包括传感器信号采集处理、控制算法及执行、动力电机驱动、转向舵机控制等,以比赛完成时间短者为优胜者。其中赛道为在白色底板上铺设黑色引导线。根据赛道特点,主要有两种寻线设计方案:一、光电传感器方案;二、摄像头方案。
这两种方案各有特点:其中光电传感器构成“线型检测阵列
- 关键字:
飞思卡尔 智能车 传感技术 光电传感器 摄像头

- 路径识别是体现智能车智能水平的一个重要标志,而传感器是智能车进行路径识别的关键检测元件。针对智能车在特殊路径与传感器数目限制的条件下的路径识别,提出了基于红外传感器的路径识别方案与基于图像传感器的路径识别方案,并对两种方案的应用性能进行了比较。通过将基于面阵图像传感器的路径识别方案应用于智能车竞赛并取得优异成绩,验证了该方案的可行性与有效性。
- 关键字:
飞思卡尔 智能车 红外传感器 图像传感器 路径识别
- 本文基于freescale 16位HCS12单片机的输入捕捉功能设计一种视频信号采集系统。在该系统中,将CMOS摄像头的输出信号二值化,利用单片机输入捕捉功能实时对信号采样、处理,提取出黑色导引线的形状特征。实验证明:系统能很好地满足智能车对路径识别性能和抗干扰能力的要求,实时性好,测量精度高,同时硬件和软件的开销都比较小。
- 关键字:
飞思卡尔 智能车 图像二值化
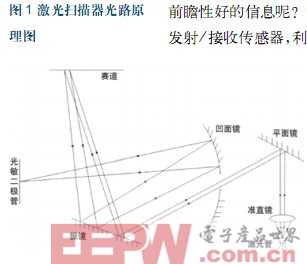
- 本文针对智能车的路径检测,提出了一种全新的、基于激光扫描原理的实现方案。在介绍激光扫描器工作原理的基础上,结合智能车路径检测的具体要求和特点,给出了硬件电路解决方案以及软件算法设计,实现了大前瞻、高精度的路径检测效果。
- 关键字:
飞思卡尔 智能车 路径检测 激光扫描

- 静静地看着精巧的车模在赛道上灵巧地行驶,耳畔是观众随着场上比赛情况时而喝彩时而惋惜,时光轮回,在朦胧中仿佛回到自己一去不复返的青春岁月。
作为面向本科生参加的飞思卡尔智能车大赛,每个人基本上只有一次参与其中的机会。笔者在第三届智能车大赛的现场见到了两年前曾经相遇的一些首届大赛的参赛者,他们这次是作为指导教师或者助理的身份再次回到这个熟悉的赛场。谈及比赛,他们的感触与两年前已经迥然不同,唯一不变的是比赛让他们对自己曾经青春岁月的无尽回忆。再次回到赛场,看着身边这些学弟学妹们的全情投入,或兴奋欢呼或
- 关键字:
飞思卡尔 智能车 传感技术 模式识别
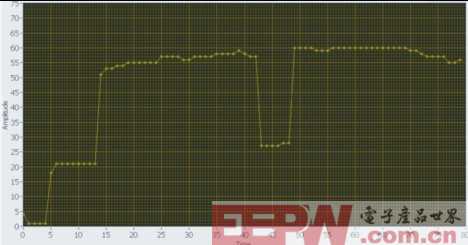
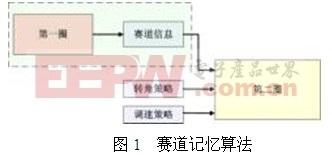
- 摘要: 本文对基于非匀速行驶状态下光电智能车的记忆算法进行了深入研究,详细介绍了系统硬件设计、原始数据的记忆、数据处理和记忆算法的实现。实践表明,使用记忆算法之后,由于对整个赛道有了超前的预知性,智能车的速度有了较大幅度的提高。随着比赛赛道的长度和复杂程度的进一步加大,记忆算法正进一步地发挥着作用。
- 关键字:
飞思卡尔 智能车 传感器
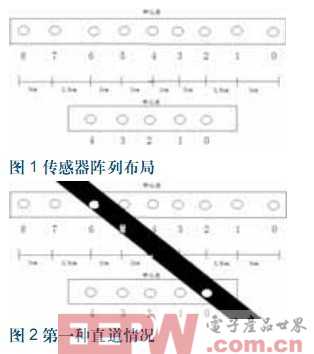
- 本文以循迹策略为主要研究对象,以采用双排传感器的智能车为例,做出了优化的直线、大弯、S弯等不同道路情况的循迹策略。经实验证明,此策略紧密结合双排红外的特点,发挥出了双排的优势,使智能车实现了以稳定为先,并追求极限速度的要求,适应能力强,能在各种赛道上均有出色发挥。
- 关键字:
飞思卡尔 智能车 双排 传感器 路径识别 循迹策略
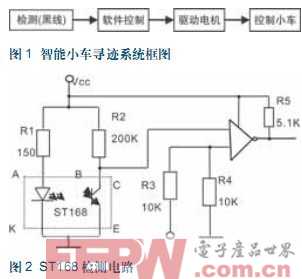
- 本文介绍了一种基于51单片机的小车寻迹系统。该系统采用两组高灵敏度的光电对管,对路面黑色轨迹进行检测,并利用单片机产生PWM波,控制小车速度。测试结果表明,该系统能够平稳跟踪给定的路径。
- 关键字:
飞思卡尔 智能车 光电对管 寻迹 脉冲宽度调制
- 路径记忆对于提高智能车速度起着至关重要的作用,但是原始路径数据中的毛刺和扰动干扰着后续的决策过程。针对上述问题,本文提出了一种基于数学形态学的滤波算法,并将其简化算法移植于单片机。经过赛道实验表明:相对于传统的阈值比较、低通滤波等方法,形态学滤波算法具有赛道还原度高、算法数据处理量小的优点。
- 关键字:
飞思卡尔 智能车 形态学滤波 路径记忆
飞思卡尔.安全气囊介绍
您好,目前还没有人创建词条飞思卡尔.安全气囊!
欢迎您创建该词条,阐述对飞思卡尔.安全气囊的理解,并与今后在此搜索飞思卡尔.安全气囊的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473