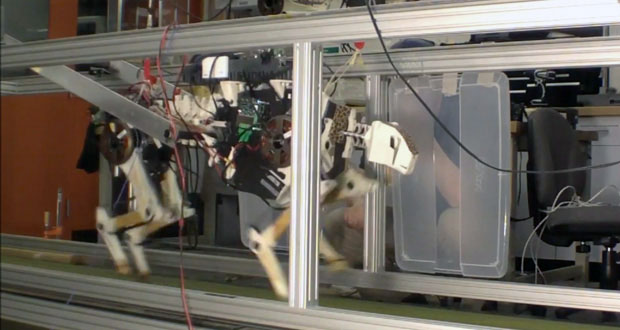
- 当谈到运行速度,麻省理工学院的猎豹机器人可能仅次于波士顿动力公司的高速四足动物机器人,但用马达取代气动 发动机后,麻省理工学院的版本显然运行的更加有效了。在最近的机器人与自动化国际会议上,该技术研究所显示了最新版本,它最高时速可达13.7英里。为此,跑步机器人需要平行的铁条来支持以保证它在一个维度上跑,减少打滚和偏航。
研究团队表示新版本的运输成本(COT表示功耗除以体重乘以速度)大约是 0.52。相比之下,本田Asimo的 COT为2。
这令人印象深刻的效率在
- 关键字:
机器人 电源
- 摘要:普通的PWM变换器具有结构简洁、控制简单、频率恒定、输出特性好等优点,故广泛应用于社会生活的各个领域中。本文以boost基本电路为基础,采用简单的无源谐振网络,设计实现了开关管的软开关。这种新型的无源软
- 关键字:
软开关技术 无源辅助谐振网络 无源变换器 仿真
- 据美国《航空周刊》5月6日报道,为了在市场份额的争夺战中取得更好的成绩,空中客车公司频频打出技术牌。目前,该公司在这方面已经做到与波音水平相当;所以,现在他们已经开始转向追求先进的制造技术,以确保能够充分享受胜利果实。
采用自动化流水线的“未来工厂”概念是其发展的焦点,这种模式能够帮助空客以创纪录的水平加快其产品生产率。目前,空客每月生产接近55架飞机,相当于该公司刚创建的第一个5年内交付的A300型飞机总量。自2000年以来,该公司的商业飞机交付量增长了60%,积压的订
- 关键字:
数字工厂 机器人

- 42岁的Michael Gore在11年前遭遇了一场严重的工伤事故,导致他脊椎受伤无法行走。然而现在他能够从椅子上站起来并且在房间内行走。这全都要感谢他所穿戴的一种被称 作“电子腿”或者“动力外骨骼”的轻型机器人。Michael所使用的模型被称作Indego,它是美国康复医院正在使用和测试的几种产品之一。
因工伤事故无法行走的Michael Gore,11年后借助一种被称作“电子腿”或者&ldqu
- 关键字:
电子腿 机器人
- 利用仿Proteus真软件实现了基于AT89C51单片机的温控报警器仿真设计。详细分析温控报警器的硬件设计原理,并在Keil开发环境下设计了对应的驱动程序,在Proteus中完成了软、硬件的联合仿真调试,最后给出了仿真运行结果。通过Proteus软件和Kell软件的联合调试,大大缩短了开发周期,降低开发成本。该设计的电路及驱动程序对相应的实际应用系统具有一定的借鉴作用。
- 关键字:
Proteus Keil 温控报警器 仿真 程序
- 机器人是机电一体化最高端的产物,也是多种高科技集成在一起的一种产品,用途非常的广泛。如今机器人发展的特点...
- 关键字:
i.mx27 机器人 视频监控

- 1 引言PID控制原理简单,适应性强,容易实现,是机器人控制的常用方法,PID控制系统设计的核心内容是如何确定其比例系数Kp、积分常数Ti和微分常数Td的最优解。控制参数的选定直接影响仿人机器人控制系统的响应速度、
- 关键字:
参数 优化 控制 PID AGA 机器人 基于
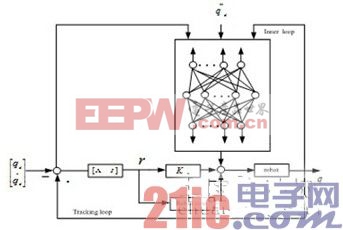
- 引言焊接机械手的轨迹跟踪是焊接机器人控制的难点。机械手是一个典型的非线性动力系统,具有大惯性和大延迟。目前对机械手的控制,主要采用传统PID控制。由于系统复杂性较高,设计人员为建立系统模型做出各种假设和简
- 关键字:
学习 控制 方法研究 机器人 辨识 神经网络 模型 基于

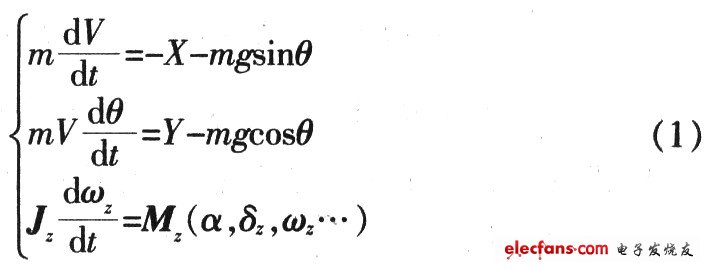
- 1 引言非线性系统在现实世界中普遍存在,可以说绝大多数系统是非线性的,例如卫星的定位与姿态控制系统、机器人控制系统、精密数控机床控制系统等等,这些都不可能采用线性模型,因此研究非线性系统的最优控制问题有
- 关键字:
机器人 应用 连接 控制 线性 反馈
- 据科技媒体engadget报道,佐治亚理工学院的一项研究成果将大力推动机器人触觉,更安全的电子签名以及一般人机交互的发展。通过使用大量压电电子晶体管(称为“taxels”),中国科学院外籍院士、美国佐治亚理工学院王中林教授领导的三人研究小组找到了一个方法,可以把运动转换成电子信号。
换句话说,采用这项技术,未来机器人的手部可以分辨出物体表面的细微差别,或是像人类手指一样抓住某个物体,而人造皮肤可以像你手臂上的微小毛发那样感知触摸。
而且,这项技术也可以用在机器人触觉
- 关键字:
机器人 电子晶体管
- 据报道,机器人非常幸运,研究人员多年一直致力于研制新型机器人皮肤,使它们越来越像人类。目前,美国科学家们研制...
- 关键字:
机器人 机器触觉 传感器
- 对于FPGA初学者而言,如何正确了解并理解FPGA的仿真是关键。应广大FPGA初学者和爱好者要求,电子发烧友网编辑根 ...
- 关键字:
FPGA 核心知识 仿真

- 机器人是机电一体化最高端的产物,也是多种高科技集成在一起的一种产品,用途非常的广泛。如今机器人发展的特点可概括为:横向上,应用面越来越宽,由95%的工业应用扩展到更多领域的非工业应用,像做手术、采摘水果、剪枝、巷道掘进、侦查、排雷等等;纵向上,机器人的种类越来越多,像进入人体的微型机器人,已成为一个新方向,可以小到像一个米粒般大小。
- 关键字:
飞思卡尔 机器人 I.MX27
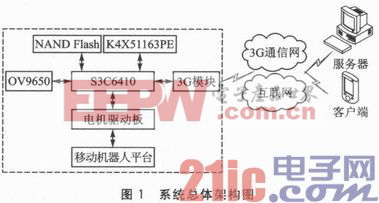
- 介绍了基于嵌入式Linux平台视频传输与控制系统的构建,给出了跨客户端通过3G网络进行远程视频传输的技术实现,并总结了在实现过程中遇到的难点以及对应的解决方案。
- 关键字:
机器人 3G Linux CGI Ajax
- 2013年4月21日,对于中国机器人的产业发展是具有里程碑意义的一天。在国家发展和改革委员会、工业和信息化部、科学技术部的指导下,在中国机械工业联合会的大力推动下,在国内外主流机器人企事业单位、大专院校、研究院所的积极参与下,由中国机械工业联合会牵头的“中国机器人产业联盟”将于4月21日在北京召开“中国机器人产业联盟成立大会”。
届时,政府相关领导、中机联会长、企业高层代表共150余人将集聚一堂,共同见证这一时刻的到来。会上,将会发布第一届联盟发起
- 关键字:
CIROS 机器人
机器人.仿真介绍
您好,目前还没有人创建词条机器人.仿真!
欢迎您创建该词条,阐述对机器人.仿真的理解,并与今后在此搜索机器人.仿真的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473