双排传感器循迹策略研究

第四种直道情况(图5)
本文引用地址:https://www.eepw.com.cn/article/95471.htm与第二种情况类似,对第五种情况的再确认,右转转大弯并经过第五种情况后,再经历此种情况,可确认无误前方为直道,继续提升小车的加速能力。控制程序由弯道程序切换到直线稳定程序。
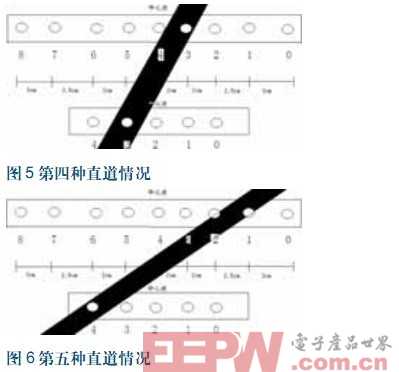
第五种直道情况(图6)
在右转大弯后,出弯时最可能出现的前后排传感器检测到黑线时的组合情况。适用于右转转 90o弯、180o弯。提前得到出弯信息,舵机向右转动较小角度,并在此时采取加速动作,起到弥补前瞻不足的作用。在赛道的s弯出现时,不满足直道的第二种识别方式,故不会加速。












评论