村田杯大学生电子设计论文大赛获奖名单揭晓

由《电子产品世界》杂志社和日本村田制作所联合举办的“村田杯大学生电子设计论文大赛”经过半年的准备期和近两个月评审阶段最终落下帷幕,多个奖项各有其主。最终,来自哈尔滨工业大学机器人研究所徐济安的论文《基于MEMS陀螺的微小型移动机器人嵌入式导航定位系统的研究》获得专家青睐,获得一等奖。
本文引用地址:https://www.eepw.com.cn/article/88215.htm本次竞赛面向全国在校大学生,由于村田制作所的产品应用范围广泛,因此最终参赛作品涉及了几乎所有电子产品领域。从专家反馈情况来看,大赛体现出了相当高的电子设计水平,也反映出现在大学生关注的电子设计领域正在逐渐宽泛起来。本次大赛具体获奖名单如下。
一等奖 哈尔滨工业大学机器人研究所 徐济安
二等奖 清华大学 代刚 四川大学 黄劲松 防空兵指挥学院 李刚
三等奖 复旦大学 温立 华侨大学 杨亮亮 广东工业大学 朱小辉
南昌航空大学 何东晖 上海交通大学 马明煌
鼓励奖 阿日贡巴彦尔 陈少华 李亮 马翼龙 唐和国
高嵩 刘小青 高强 成智刚 俞斌
邓先武 苗强 陈力 田德丽 章欢
一等奖论文节选
基于MEMS陀螺的微小型移动机器人嵌入式导航定位系统的研究
■ 徐济安 哈尔滨工业大学机器人研究所 哈尔滨 (150001)
图1所示为本文构建的导航定位系统总体框图,可以分为5个部分:(1)航向测量单元:采用村田公司的新型压电振动MEMS陀螺ENC-03R作为系统的水平方向航向角的测量传感器。(2)位置测量单元:采用一个外加光电码盘的随动轮作相对位置跟随测量,并采用Altera公司的EPM7032型CPLD对随动轮正交光电编码器的信号进行处理。(3)软件平台及信号处理单元:基于mC/OS-II嵌入式实时操作系统进行任务划分和调度,实现陀螺数字信号处理、插值升频、信息解算等处理算法。(4)中央硬件平台:采用NXP公司的基于ARM7TDMI核的高性能主流处理器LPC2148,所有的运算及处理算法和硬件外设控制均由核心处理器实现。(5)通信单元:本系统可作为独立的移动机器人导航定位子系统,基于双缓冲队列并遵循自定的通信协议与上位机(即机器人上层控制器)进行实时、高速率串行通信。
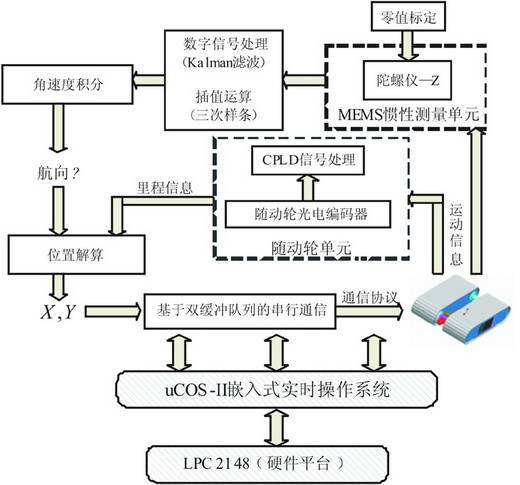
图1 系统组织架构框图








评论