结合FPGA与DSP的仿人假手控制系统设计

3软件实现
本文引用地址:https://www.eepw.com.cn/article/273148.htm在FPGA控制器程序设计中主要完成各系统参数的初始化与控制算法的实现,具体由如下几部分构成:
1)与上位机通信部分:通过3种方式与上位机通信,获得控制指令,分别为USB通信、LVDS通信、CAN通信,其中LVDS通信与CAN通信不能同时使用;
2)肌电信号采集部分:通过A/D转换芯片将肌电电极信号转换为数字量,并经过运算处理得到控制指令;
3)与手指运动控制模块通信部分:通过SCI接口实现与手指运动控制模块的RS—485通信;
4)生成驱动电机控制参数部分:运算处理控制指令,生成电机运动参数(方向与占空比)。
控制流程图如图7所示。
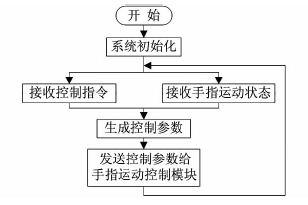
图7 FPGA控制流程图
DSP控制程序主要完成DSP各参数的初始化,控制流程图如图8.
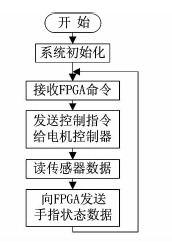
图8 DSP控制流程图
4假手抓取实验
基于上述设计,研制出HIT V假手样机,进行抓取实验(图9),可实现多种动作模式的抓取,分别为:两指捏取、三指捏取、圆柱抓取、球形抓取、单指指向、胡克抓取、侧边捏取、五指端取。控制过程中,系统工作稳定,满足仿人假手运动控制和传感器信息采集要求。

图9多指抓取实验
5结论
本文介绍了结合FPGA与DSP的仿人假手控制系统的设计组成与工作流程。该控制系统体积小巧,可完全安装于假手内部。实验证明:该系统运行可靠、控制灵活,使用效果良好。

fpga相关文章:fpga是什么












评论