基于DSP控制的三电平变频器的研究

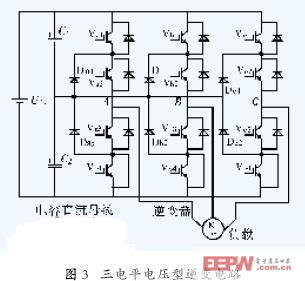
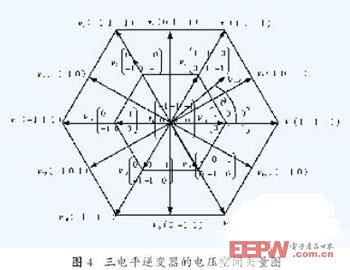
通过控制开关管Vi1、Vi2、Vi3、Vi4(其中i=a、b、c) 的开通和关断可以在该i桥臂输出三种不同的电平,即Udc/2、0、- Udc/2。当一个桥臂上Vi1、Vi2 两管导通,Vi3、Vi4两管关断时,开关状态Si为1,桥臂输出电压为Udc/2;Vi2、Vi3两管导通,Vi1、Vi4两管关断时,开关状态Si为0,桥臂输出电压为0;Vi3、Vi4两管导通,Vi1、Vi2两管关断时,开关状态Si为-1,桥臂输出电压为- Udc/2,每相的开关状态有3种即1、0、-1。因此三相三电平逆变器有27 种开关状态,其中有效的有19种,称为基本电压空间矢量。按照空间矢量幅值大小可分把基本电压空间矢量为四类:零电压空间矢量(零矢量)v0;小电压空间矢量(小矢量)v1、v4 、v7、v10、v13、v16;中电压空间矢量(中矢量)v3、v6、v9、v12、v15、v18;大电压空间矢量(大矢量)v2、v5、v8、v11、v14、v17。其中零电压空间矢量对应三个开关状态(1 1 1)、(0 0 0)、(-1 -1 -1),每个小电压空间矢量都有两种开关状态,电压空间矢量图如图4所示。
在进行电机调速时,要获得良好的性能指标,须保持磁通量椎m额定不变。如果磁通太弱就没有充分利用电机的铁芯,是一种浪费;如果过分增大磁通,又会使铁芯饱和,过大的励磁电流使绕组过热而损坏电机。
三相异步电动机的每相电动势的有效值为
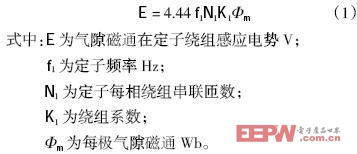
要保持磁通量额定不变,变频调速中须维持E/f= 常数。但是,电机定子气隙电势难以直接测量、控制。
因此,变频器要维持恒磁通,只要使U与f成比例改变即可。该控制方式简称恒U/f控制。

3 控制策略
3.1 系统的控制结构
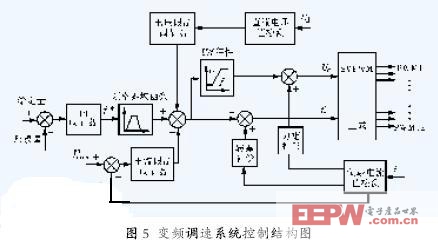
普通变频器一般采用速度开环变压变频控制,如图5所示。
3.2 DSP的选型
DSP是一种特别适合于进行数字信号处理运算的微处理器,其内部采用程序和数据分开的哈佛结构,具有专门的硬件乘法器,广泛采用流水线操作,提供特殊的DSP指令,可以用来快速地实现各种数字信号处理算法。
为了满足三电平逆变器的控制要求和SVPWM控制算法运算量大及实时电压、电流检测、分析和计算的特点,结合本系统需要较强的数字信号处理能力和DSP应用普及程度,DSP选用TMS320LF2407A。
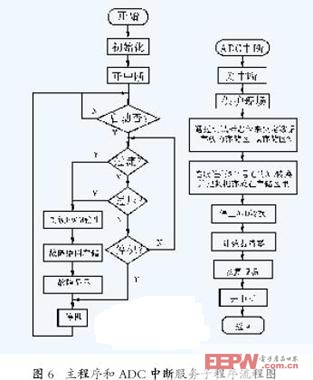
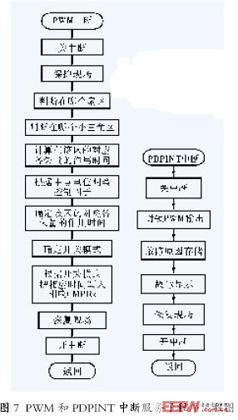
3.3 系统的软件设计
为了获得良好的运行效果,合理地编制控制软件是十分重要的。在软件设计时,为了调试方便,系统软件采用模块化结构,即每一模块完成一定的功能。程序由主程序、ADC中断服务子程序、功率驱动保护(PDPINT)中断服务子程序和PWM 中断服务子程序组成,其流程图如图6和7所示。











评论