光学测量光学测头的应用趋势

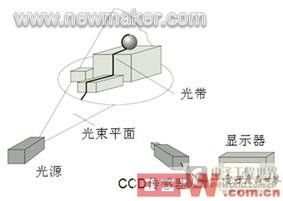
图4 将一条由若干光点组成的光条纹投射到物体表面
更有测头用光栅将一束光分散并编码,形成一定模式的结构光光源,这样在传感器上就可以得到一组畸变光线,从而进一步提高采点的速度(图5)。
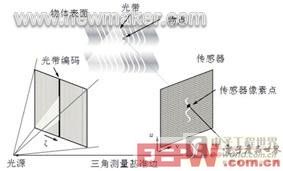
图5 测头用光栅将一束光分散并编码,形成一定模式的结构光光源
目前,各种光学测头采用的光源种类主要有激光和白光。激光作为一种准直、相干的单色光,广泛地作为点测头和线测头的光源。而白光则是由各种波长的光组成,因此颜色呈白色,目前较多地作为结构光光源。由于白光的物理特性,白光点测头也逐渐应用于测量领域中。激光和白光的最大区别在于,激光是一种单色光,因此拥有高度相干性,有些测头正是利用了激光的相干性来实现其功能;而白光是由各种波长的光组成,所以相干性相当微弱。如前所述,利用单色光的高度相干性可以根据某些原理进行测量,但事物的两面性同时说明,在有些地方相干性也会干扰测量。举例说明,激光测头利用物体表面的反射光进行三角测量时,照射到物体表面的激光会呈现颗粒状的结构,这种颗粒状的结构称为“散斑”,而这种现象称为“散斑效应”。散斑效应的产生,是由于激光照射在粗糙表面经反射造成的。大多数物体的表面与激光的波长相比都是粗糙的,因此当光波从物体表面反射时,表面各点都发出一束高度相干的子波,子波叠加的结果就形成了物体表面呈随机分布的散斑(图6)。

图6 子波叠加的结果就形成了物体表面呈随机分布的散斑
而白光由于由各种波长的光组成,因此相干性被大大削弱,所以在物体表面反射时,很难观察到散斑效应。这样的区别对于三角测量来说影响是十分巨大的。原因在于,三角测量是依靠像点在传感器上的位置来确定物点的空间位置的。而像点在传感器上通常不会是简单的一个点,反射光照射到传感器上使得一部分像素感光,计算机可以通过像素分析来确定这一群像素的中心,从而得到像点的位置。由于散斑效应的存在,使得要确定像点的位置变得非常困难,且误差较大。而分布均匀且对称的光点对像点位置的确定非常有利(图7)。这就是三角测量当中白光性能要优于激光的根本原因。












评论