基于ARM单片机的汽车电动助力转向系统的研究


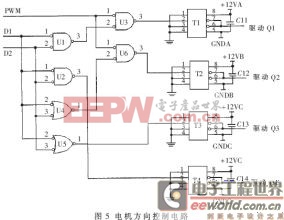
方向控制电路主要由与门和或非门组成,其电路原理如图5所示。U1、U2、U3、U6为与门,U4、U5为或非门,系统采用单极性PWM调制方式,D1、D2为方向控制信号。D1、D2共有四种组合。11时电机正转,00时电机反转,01和10时电机停止。当D1、D2为11时,与门U1、U2输出高电平,其中,U2的信号用于驱动光耦T4,开启MOS管Q4。U3根据PWM信号和U1的信号驱动光耦T1,开启MOS管Q1,即Q1、Q4导通。此时,或非门U4、U5和与门U6的输出为低电平,光耦T2、T3截止,MOS管Q2、Q3关断,电机正转。当D1、D2为00时,情况正好相反,T1、T4截止,Q1、Q2关断,T2、T3开启,Q2、Q3导通,电机反转。
3.4 电路的保护设计











评论