系统控制对象为Minas A系列MDMA152A1G交流PMSM,电机参数:额定电压200 V,额定电流9.4 A,额定转矩7.15 N·m,额定转速2 000 r·min-1,np=4,定子电阻0.2 Ω,转子惯量1.23×10-3kg·m2,磁链给定0.24 Wb。EKF算法的参数和初值如下:P(0)=diag(0.001,0.001,1 000,0.001);Q(k-1)=diag(0.001,0.001,1 000,0.02);R(k)=diag(25,25);x(0)=zeros(4,1)。图3为电机在给定转速分别为1 500 r·min-1,800 r·min-1和80 r·min-1时,空载起动的实测转速ns与EKF观测的转速ng波形。其中ns是通过光电码盘由DSP在线测得。可见,在不同的给定转速下,电机在起动和稳态运行过程中,EKF观测器都能较好地估计出实际转速,电机运行平稳。电机在低速运行时,转速有一定波动,这是因为在低速时实际需检测的反馈信号值很小,电流谐波和A/D转换误差等干扰因素就显得较为突出,使得转速有一定波动,因此采用此方法电机在低速的运行性能不如中高速的运行性能。本文引用地址:https://www.eepw.com.cn/article/237791.htm
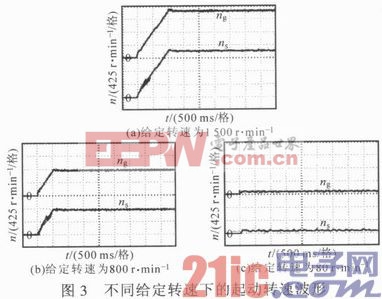
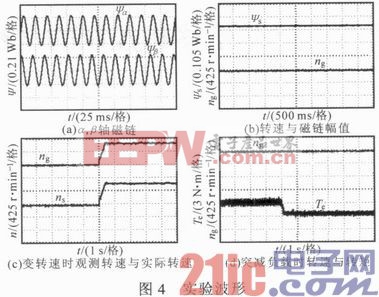
图4a为电机在给定转速为800 r·min-1时,空载稳定运行时EKF观测器所观测的ψα,ψβ波形;图4b为ng,定子磁链幅值ψs波形;由图4a,b可见,系统稳态运行时,ng,ψs与其给定值相等,且脉动很小,系统具有良好的稳态性能。图4c为电机在给定转速为800 r·min-1空载稳定运行情况下,将给定转速突增为1 500 r·min-1时的ng,ns波形,可见,当给定转速发生变化时,ng可较快地跟踪ns变化;图4d为给定转速为800 r·min-1稳定运行时,突减负载时所得到的ng,Te波形,可见,突减负载时转速几乎没有波动,同时也验证了所建立的控制系统具有良好的鲁棒性。
5 结论
针对永磁同步电机改进直接转矩控制系统,采用扩展卡尔曼滤波器实现对电机磁链和转速的准确估计,实验结果表明提出的无速度传感器直接转矩控制策略的可行性与正确性,并可得到以下结论:①采用该方法,电机能在较宽转速范围内起动和稳定工作;②在转速和负载变化过程中,扩展卡尔曼滤波器观测出的转速和磁链都能准确跟踪给定值,控制系统静、动态性能较好,鲁棒性较强。
















评论