基于MSP430 单片机的智能小车寻迹模块设计方案

4 MCU控制与算法实现
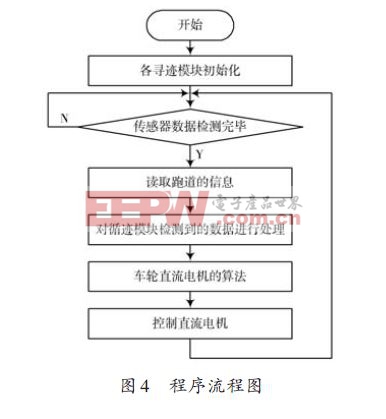
系统控制由微处理器完成,微处理器采用MSP430单片机,当单片机读入传感器的信号后即可判断小车当前的行驶状态,具体流程如图4所示。
5 系统设计方案
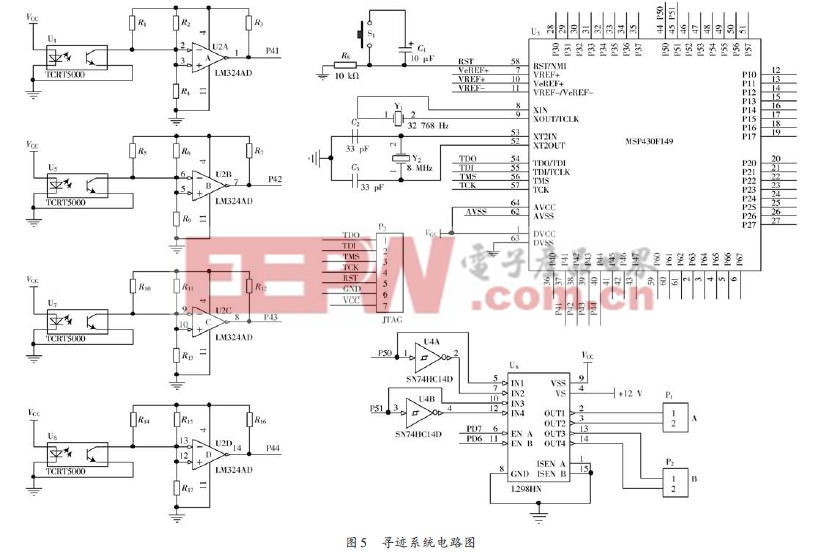
本文设计的智能小车寻迹系统的电路如图5 所示。其中U1、U5、U7、U8 分别为反射式光电传感器A、B、C、D,布局如图5 所示,负责采集轨道信息。U6 为L298驱动模块,负责控制智能小车两侧直流电机。
6 结语
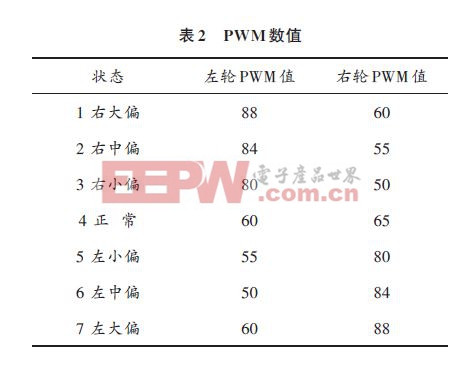
本文所设计的方案通过对智能车寻迹模块的研究,分析MSP430单片机的应用,利用感光传感器信息来控制智能车的自动转向,实现了智能车的自动寻迹。该寻迹系统的工作流程可概括为:通过四个外置的反射式红外线传感器收集轨道信息,在通过微处理器对采集到的信息进行处理,然后将处理后的信息通过PWM 信号传递给L298 驱动模块,L298 模块根据接收到的轨道信号控制智能车两侧直流电机的运行状态,最终达到寻迹的目的。智能车在军事、工业和民用领域的实际应用中,涉及到如何构造完整的导航系统以及多种传感器数据融合及控制算法等,这需要在实践中不断研究探索
电机保护器相关文章:电机保护器原理











评论