基于MSP430 单片机的光电跟踪伺服系统的研究方案

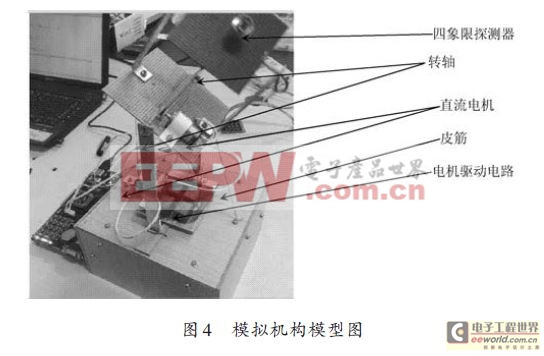
其中下平板主要用于带动上平板实现大范围搜寻目标,上平板及其配置设备实现精确定位和跟踪功能。研究中利用皮筋的弹性以及牵引丝线柔软且形变相对较小的优势,实现搜索平面的任意角度转动。并利用废弃的中心笔管代替齿轮实现轴的小摩擦先转动。使得模型轻小便捷,制作简单方便,并且变废为宝。
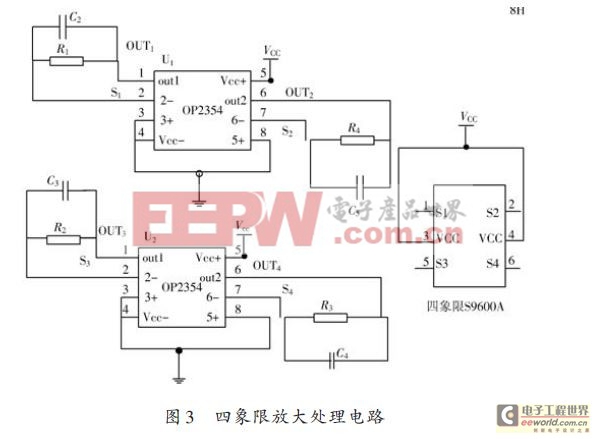
四象限放大处理电路如图3所示。
3 软件编程
软件编程部分主要包括目标的粗搜寻和目标的精定位及跟踪两个部分。编程中载入自动搜索程序搜寻目标光源,对目标进行三维维的空间片区性搜索,并载入判别搜到目标程序,具体通过A/D采集到的电压范围判别是否搜到目标。目标一旦搜到,即载入坐标运算程序,计算当前四象限面板与目标位置的归一化坐标差值,进而调用PID 算法程序,将PID 的调节量转化为PWM 波的输出持续时间和占空比,通过调用控制电机转动圈数程序对目标进行追踪。通道误差计算程序如图5所示。

4 PID控制算法设计
PID 算法主要有位置式算法和增量式算法两类。
一般增量式算法适用于控制精度要求不高的系统中,位置式适用于控制精度要求较高的控制系统中。












评论