频率响应法--奈奎斯特稳定判据

 |
2、利用奈氏判据确定系统的参数稳定范围
如果系统中的某个参数或若干个参数是可以变化的,为使系统稳定,可利用奈氏判据来确定系统的参数稳定范围,即根据奈氏曲线是否通过(-1,j0)点的条件来选定参数。下面以例说明之。
例5-8 试用奈氏判据确定该闭环系统稳定的K值范围。
已知一单位反馈系统的开环传递函数为
试用奈氏判据确定该闭环系统稳定的K值范围。
解 该系统是一个非最相位系统,其开环系统幅频和相频特性的表达式分别为
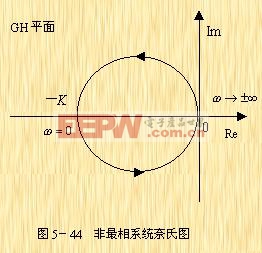 |
和惯性环节一样,它的奈氏图也是一个圆,如图5-44所示。由于系统的P=1,当ω由![]() 变化时,
变化时,![]() 曲线如按逆时针方向围绕(-1,j0)点旋转一周,即N=-1,则Z=1-1=0,表示闭环系统是稳定的。由图5-44可见,系统稳定的条件是K>1。
曲线如按逆时针方向围绕(-1,j0)点旋转一周,即N=-1,则Z=1-1=0,表示闭环系统是稳定的。由图5-44可见,系统稳定的条件是K>1。
3、具有时滞环节的稳定性分析
由于时滞系统的开环传递函数中有着![]() 的环节,其闭环特征方程为一超越方程,因而劳斯稳定判据就不适用了。但是,奈氏稳定判据却能较方便地用于对这类系统稳定性的判别。
的环节,其闭环特征方程为一超越方程,因而劳斯稳定判据就不适用了。但是,奈氏稳定判据却能较方便地用于对这类系统稳定性的判别。
设含有时滞环节的开环系统的传递如下:
 |
|
式中, ![]() 为时滞时间常数。将上式改写成:
为时滞时间常数。将上式改写成:
|
其中
 |
|
不含时滞环节的传递函数。相应地,开环系统的幅频特性和相频特性为:
 |
|
上式表明,当![]() 时,相对于
时,相对于![]() ,
,![]() 的幅值没有变化,而相角则在每个
的幅值没有变化,而相角则在每个![]() 上顺时针多转动了
上顺时针多转动了![]() 。
。
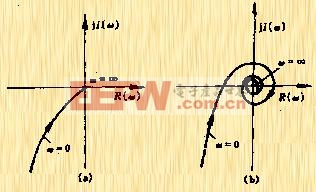
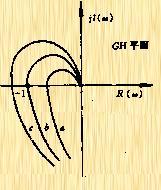
由于实际的控制系统中,![]() ,因此当
,因此当![]() 时,
时,![]() 的模趋于零,因而
的模趋于零,因而![]() 随
随![]() 以螺旋形趋于原点,并且与GH平面的负半轴相交无穷点,如图5-45。因此为使系统稳定,奈氏曲线与负实轴相交点必须位于(-1,j0)的左边。
以螺旋形趋于原点,并且与GH平面的负半轴相交无穷点,如图5-45。因此为使系统稳定,奈氏曲线与负实轴相交点必须位于(-1,j0)的左边。
 |
| 图5-45 |
例5-9 试分析滞后时间 对系统稳定性的影响。
设一时滞控制系统如图5-46所示。已知图中的 ![]() ,试分析滞后时间
,试分析滞后时间![]() 对系统稳定性的影响。
对系统稳定性的影响。
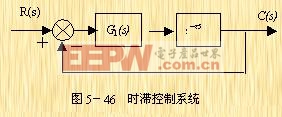 |
解 系统的开环传递函数为
|
取![]() 值分别为0,2,4,图5-47示出了式(5-51)在不同
值分别为0,2,4,图5-47示出了式(5-51)在不同 ![]() 值时的奈氏曲线。由图可见,当滞后时间
值时的奈氏曲线。由图可见,当滞后时间![]() 为零时,系统相当于无时滞环节,
为零时,系统相当于无时滞环节,![]() 不包围(-1,j0),所以闭环
不包围(-1,j0),所以闭环





评论