基于ARM的汽车黑匣子设计

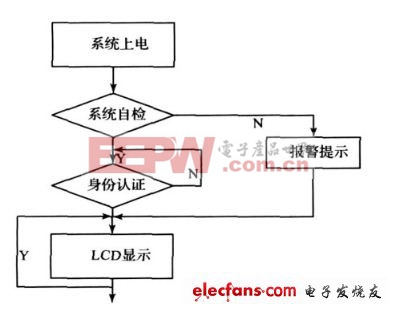
图7 系统主程序流程图
4. 1 数据采集
记录仪读取到原始数据后,根据脉冲量和车辆特征系数等能够计算出总累计行驶里程、最近2 个日历天的累计行驶里程、最近360 小时内的累计行驶里程、每200 毫秒的速度和每分钟的速度。
记录仪采集的脉冲来自于速度传感器,该速度传感器每转产生8 个脉冲,而车辆在每公里使速度传感器旋转的转数由车辆特征系数决定。记录仪根据所记录的脉冲数,可以得到车辆行驶的里程。
由脉冲数计算出行驶速度,只要先由脉冲数计算得到里程数,再除以时间,即可得到速度。
4. 2 GPRS 设计
M22 支持GPRS CLASS4 , 即下行速度42. 8 Kbp s ,上行速度21. 4 Kbp s.同时,M22 也支持嵌入式的TCP/ IP 协议。这个嵌入式的TCP/ IP协议解决了从命令模式连接到数据传输模式的一个比较复杂的过程。
因为有了嵌入式的TCP/ IP ,所以可以实时的传输大量汽车记录数据,实现实时监控车辆的运行情况。使用TCP 协议进行数据通信时,必须要经过三个阶段,第一个阶段是连接建立阶段,第二个阶段是数据收发阶段,第三个阶段是连接释放阶段。
本系统中发送短消息采用而PDU 模式,因为它不仅支持中文短信,也能发送英文短信。PDU模式收发短信可以使用3 种编码: 72bit 、82bit 和UCS2 编码。
5 结 论
本设计是在传统记录仪上,添加GPS , GPRS模块,并对该系统进行测试的结果是能够实现精确定位(民用标准) 、远程监控、电子狗及数据传输等功能,实现了基本记录仪与GPS 导航一体化,满足系统的设计要求。









评论