未来SDV内幕:集成远程控制边缘节点

简介
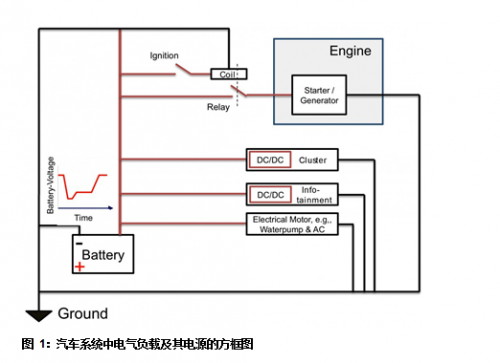
汽车车载网络不断发展,以支持未来SDV内幕:集成远程控制边缘节点中的新功能。随着软件整合到更少的电子控制单元 (ECU) 中,以增强车辆各个平台的可扩展性并简化无线 (OTA) 更新,一种新颖的远程控制边缘概念不仅优化布线,而且支持可扩展的边缘节点软件。边缘节点是对特定功能进行实时控制的专用 ECU,例如用于外部照明的前照灯模块或用于门锁、车窗和侧后视镜的控制模块。这些节点在整个车载网络中接收来自命令器 ECU(区域控制器,域控制器或中央计算)的命令。
边缘节点对本地硬件控制进行管理,它监测温度、压力或位置传感器以提供控制环路反馈,同时通过负载驱动器(包括半桥以及高侧和低侧开关)直接控制电机和电磁阀等机械执行器。图 1 展示了区域架构中边缘节点和命令器 ECU 之间的差异。

图1 包括命令器ECU和多个边缘节点的汽车区域架构
远程控制边缘架构将实时控制和硬件抽象层 (HAL) 上行游转移到命令器 ECU,后者为传感器和负载驱动器生成低级硬件命令并传输到边缘节点。远程控制边缘解决方案通过串行外设接口 (SPI)、内部集成电路 (I2C)、通用异步接收器/发送器 (UART) 和通用输入/输出 (GPIO) 等低级通信接口,在 ECU 之间桥接更高级别的网络数据链路层,例如以太网或控制器局域网 (CAN) 等。这种方法从边缘节点中完全移除了微控制器 (MCU) 和所有软件。
远程控制边缘方案支持有关 SDV 的重大趋势,并通过将软件集中在命令器 ECU 中同时使边缘节点中依赖于负载的硬件靠近机电执行器来减少线束数量。
传统边缘节点与远程控制边缘节点的对比
图 2 显示了传统边缘节点的方框图。在传统架构中,本地 MCU 包含 HAL,HAL 是定义器件软件驱动程序如何与硬件交互的软件。边缘 MCU 通过网络接口(通常是 CAN 灵活数据速率 (CAN FD) 本地互连网络)接收来自控制器 MCU 的命令,并根据控制器发出的指令控制本地硬件。
例如,如果上游控制器 MCU 向边缘 MCU 节点发送命令“升起驾驶员侧车窗”,则边缘 MCU 会将该消息转换为特定的硬件操作,包括升起车窗、执行车窗软关闭以及防止可能发生的电机失速或车窗夹手事件。边缘节点 MCU 将必要的 SPI 消息传送到电机驱动器,并通过发送到半桥电机驱动器的脉宽调制 (PWM) 输出实施窗口电机的实时控制环路,同时使用集成式模数转换器 (ADC) 监控电机电流并对霍尔效应脉冲计数以进行窗口位置跟踪。

图2 与命令器ECU进行通信的传统边缘节点方框图
图 3 展示了远程控制边缘节点方框图。这种架构将 HAL 和实时执行器上行移入命令器 ECU 的 MCU 中,完全消除了边缘节点 MCU。控制器 MCU 现在可以发送包括器件通信协议帧或外设控制(SPI、I2C、UART、PWM 输出控制、ADC 采样或 GPIO)的命令。
对于车窗升降应用,控制器通过网络发送嵌入到标准通信协议数据有效载荷(CAN FD Light 或 10BASE-T1S)中的直接控制数据(SPI 电机驱动器命令和 PWM 输出设置)。边缘节点中的通信桥接器提取这些协议数据有效载荷并在相应的 GPIO 引脚上输出 SPI 帧和 PWM 信号。对于传感器反馈,该桥接器对内部或外部 ADC 和霍尔效应传感器数据进行采样并将数据发送回命令 ECU 以完成控制环路。

图3 与命令器ECU进行通信的远程控制边缘节点方框图
远程控制边缘节点的优势
远程控制边缘架构具有多种优势,包括实现软件集中化、降低软件开发成本、支持可扩展性和简化 OTA 更新。此外,使用远程控制边缘节点可以实现从命令器 ECU 进行负载驱动器控制,同时最大限度减少负载接线。
远程控制边缘节点可通过软件集中化降低系统成本。通过移除边缘微控制器并将软件集中到更少的 ECU 中,公司可以减少软件开发工作量和管理开销,减少整个车辆中多个 ECU 的测试和验证要求。
软件集中化还提高了可扩展性。开发人员可以仅为上游命令器 ECU 创建软件,同时实现边缘节点中硬件的标准化。这种标准化简化了多个节点和 ECU 间的车辆基础设施,而无需使用专用边缘硬件。
图 4 将传统方法(每个边缘节点模块使用不同供应商提供的不同 MCU,需要跨多个平台进行软件开发和管理)与远程控制边缘方法(图 4 中的标签“RCE 解决方案 A、B 或 C”代表多个供应商提供的无软件选项)进行了对比。基于标准的解决方案具有额外的优势,因为无论是哪家远程控制边缘解决方案供应商,命令器 ECU 的软件都保持一致。

图4 远程控制边缘节点与传统边缘节点的硬件可扩展性
实现控制集中化让汽车制造商能够简化软件管理和 OTA 更新,使他们更容易拥有和管理自己的软件。发布 OTA 更新只需要更新命令器 ECU,不需要更新多个模块的软件。
使用边缘节点而不是直接从命令器 ECU 驱动负载,缩短了连接负载驱动器的电线长度。远程控制边缘节点保持这一优势,同时还将 HAL 保留在命令器 ECU 中。图 5 以车门为例展示了区域架构中的这种配置。尽管区域控制器控制两个车门模块,但车门边缘模块缩短了负载布线,这也有助于通过尽量减少寄生电容和电感来减少电磁干扰,对于需要更快开关时间的下一代 48V 车辆,这一点尤其重要。

图5 与传统边缘节点相比,远程控制边缘节点的电缆减少
远程控制边缘节点注意事项
从事远程控制边缘技术研究的原始设备制造商 (OEM) 和设计人员必须考虑延迟、功能安全、网络安全和成本。
延迟是一项重大设计挑战。来自边缘的数据必须上行,在上游进行决策并由边缘处理,然后下行返回边缘进行实施,这会增加实时控制环路的延迟。图 6 展示了这种负载检测和控制过程。传统边缘节点只需要完成第 2 步和第 5 步,而远程控制边缘解决方案实现了智能操作或自主轮询等功能来减少延迟。智能操作允许桥接器件自动传送传感器数据,而无需命令器 ECU 初始提示,从而省略了第 1 步。自主轮询使桥接器件能够自动对传感器采样并将读数存储到缓冲器。因此,可以在其他步骤期间执行第 2 步,这有助于进一步减少延迟。

图6 增加延迟的远程控制边缘节点的通信步骤
由于不再有本地实时控制,因此可能会出现功能安全问题。有着严格要求(例如容错时间间隔规范中的严格延迟要求)的边缘应用可能难以处理上游通信延迟。作为一项较新颖的技术,第一代远程控制边缘器件可能无法满足汽车安全完整性等级要求,或者可能需要采取额外措施来实现系统级的功能安全。
随着车辆越来越依赖软件,网络安全风险也随之增加。如果不采取适当的安全措施,黑客就能够访问车载网络并控制全车的功能,这可能会带来盗窃和安全风险。由于在远程控制边缘节点没有 MCU 在本地管理安全,因此在远程控制边缘节点上实现网络安全更为困难,因此 OEM 务必要选择满足其网络安全需求的解决方案。
成本考虑因素必须平衡硬件和软件费用。将目前在传统边缘节点中使用的低级 MCU 替换为远程控制边缘节点器件可能更加昂贵。但是,请务必记住,即使硬件成本增加,软件开发和管理成本仍将大幅节省。
远程控制边缘让汽车制造商能够在内部管理更多软件,OEM 需要对一些折中进行评估。
远程控制边缘应用
远程控制边缘技术在照明、电池管理系统 (BMS)、高级驾驶辅助系统 (ADAS)、汽车门禁和车身电机等众多应用中提供价值。表 1 列出了这些应用和远程控制边缘节点的优势。

表1 各种远程控制边缘节点应用以及它们为什么非常适合
远程控制边缘协议
远程控制协议解决方案包括 10BASE-T1S、CAN FD Light 和 UART over CAN。这些协议以半双工模式运行,允许两个器件之间进行非同步双向数据传输。半双工支持多点功能,即两个以上器件在同一条总线上通信,只需要命令器 ECU 中的一个网络器件与多个边缘节点交互。图 7 展示了一个多点拓扑示例。

图7 命令器ECU与边缘节点之间的多点拓扑
10BASE-T1S、CAN FD Light 和 UART over CAN 在速度、有效载荷容量以及多点和总线拓扑中的节点数量方面存在差异同。表 2 对这些协议进行了比较。

表2 10BASE-T1S、CAN FD Light和UART over CAN远程控制边缘网络协议间的比较
图 8 展示了轮循拓扑和命令器/响应器拓扑之间的差异。轮询拓扑循环运行,在每一周期,每个节点根据其节点 ID 有一个专属传输机会。这样,仲裁将自动进行,但需要进行调解以确保优先级或时间关键型数据不会因总线上的低优先级数据而延迟。命令器/响应器拓扑要求命令器 ECU 在总线上发送数据之前提示下游节点。传输顺序由命令器 ECU 而不是由节点 ID 决定。

图8 轮循拓扑与命令器/响应器者拓扑的传输比较
10BASE-T1S 由电气电子工程师协会 (IEEE) 802.3cg 实现标准化,它使用由技术委员会 18 制订标准的远程控制协议。其工作速率为 10Mbps 并采用轮询多点拓扑。作为以太网协议,10BASE-T1S 可以集成以太网功能,例如媒体访问控制安全 (MACSec)、时间敏感网络 (TSN)、音频视频桥接 (AVB) 和数据线供电 (PoDL)。表 3 介绍描述了这四个功能。此外,已经使用高速以太网主干网的系统可以在整个以太网网络受益于精简的软件。


表3 列出和说明10BASE-T1S以太网功能和标准
CAN FD Light 是基于国际标准化组织 (ISO) 11898-1:2024 标准的 CAN FD 的一个版本,工作速率为 1Mbps 至 5Mbps。与遵循 CAN 仲裁(节点同时传输,节点 ID 最小的节点胜出)的传统 CAN 不同,CAN FD Light 采用命令器/响应器者拓扑运行。边缘节点使用 CAN FD Light 响应器,命令器 ECU 使用 CAN FD Light 命令器或 CAN FD 收发器。由于许多现有架构已经使用 CAN FD 收发器与边缘节点通信,因此可以轻松地将 CAN FD Light 集成到当前架构。然而,考虑到控制器仲裁阶段的限制,实现 >1Mbps 的速度需要使用 CAN FD Light 命令器。
10BASE-T1S 和 CAN FD Light 协议将以太网和 CAN 桥接至 SPI、I2C、UART、GPIO 和 PWM 等其他协议(请参阅图 9)。这种桥接可通过 10BASE-T1S 和 CAN FD Light 实现多个传感器和驱动器的远程控制,使这两种解决方案可在各种终端应用中通用。

图9 10BASE-T1S或CAN FD Light边缘节点的方框图
UART over CAN 使用 CAN 收发器通过 CAN 物理层 (PHY) 传输 UART 数据包(请参阅图 10)。在命令器/响应器拓扑中,UART over CAN 的工作速率 ≤1Mbps,它提供了一种具有成本效益的解决方案,但依赖于基于 UART 的驱动器(例如 LED)或具有集成实时控制和诊断功能的电机驱动器。

图10 UART over CAN边缘节点的方框图
具有集成实时控制的智能驱动器补充完善了远程控制边缘解决方案,它减少了上游控制要求。德州仪器 (TI) 为无传感器电机系统提供具有集成控制的智能电机驱动器,包括用于无刷直流 (BLDC) 电机驱动器的无传感器磁场定向控制以及用于步进电机驱动器的集成电流检测和失速检测。步进电机由于旋转精度更高,特别适合远程控制边缘应用,因为它们需要更少的上游诊断数据。表 4 列出了一些 TI 器件。

表4 TI的电机驱动器产品
远程控制边缘系统解决方案
图 11 展示了使用 10BASE-T1S 或 CAN FD Light 的前照灯远程控制边缘节点。PHY 或响应器将以太网或 CAN FD Light 消息转换为各种本地协议,控制温度传感器、LED 驱动器、电机驱动器和高侧开关。命令器 ECU 向 PHY 或响应器提供命令,以通过 UART、SPI、GPIO 或其他协议启用负载驱动器,从而打开和关闭执行器。然后,PHY 或响应器上行发送传感器数据和执行器反馈到命令器 ECU。

图11 使用10BASE-T1S或CAN FD Light的远程控制前照灯模块方框图
利用具有集成步进电机梯形控制功能的 TPS92544-Q1 开关 LED 驱动器和 DRV8434A-Q1 步进电机驱动器,TI 提供了采用 UART over CAN 协议的远程控制边缘前照灯解决方案。TPS92544-Q1 通过单个 UART 接口控制 LED 和电机,使其成为高效的前照灯模块解决方案。如图 12 所示,CAN 收发器用作来自命令器 ECU 的 UART 数据包的硬件介质。
这些 UART 数据包控制 TPS92544-Q1 以启用前照灯,并驱动 DRV8434A-Q1 器件对调平电机进行步进电机运动控制。

图12 使用TPS92544-Q1和UART over CAN的远程控制前照灯模块方框图
结语
随着汽车市场接受在区域架构上进行 SDV 和 ECU 整合,软件集中化的推动力将进一步增强,从而实现可扩展性并减少电线数量。远程控制边缘节点通过将软件上行游移动并整合到更少的 ECU 中以及简化 OTA 更新为这一举措提供支持。
10BASE-T1S、CAN FD Light 和 UART over CAN 等多种解决方案可为系统架构师提供满足其具体设计需求的选项。此外,具有集成诊断和控制功能的智能驱动器可进一步优化远程控制边缘实现。
(本文登于《EEPW》202511期)





评论