L3级汽车有哪些充分必要条件?

在华为系强势垄断了35万元以上高端电动车市场、小米凭借摧枯拉朽之力重塑了25-35万元纯电动中高端汽车市场的格局之后,比亚迪、吉利、长城等传统车企和蔚小理等新势力车企都需要直面问题,正视差距,重新寻找自己的位置。知己知彼,百战不殆,在面对华为和小米这两个具有超高流量能力、超强品牌力以及超强技术实力的天选选手时,所有车企都要重新审视一下自己,看看自己手里的牌到底和小米、华为比起来有哪些不一样的地方,可以另辟蹊径地塑造出哪些独到的竞争力。在7月3号的“业界首款L3级算力汽车”小鹏G7的发布会上,小鹏汽车第一个出牌了,作为跟小米“两小无猜”的小字牌车企,小鹏决定继续强化历时十年打造的自动驾驶长板,并凭借端侧部署VLM大模型的AI座舱进一步夯实自己的强科技属性。在自动驾驶上与华为硬碰硬,在智能座舱上与小米较量,小鹏这种针尖对麦芒的硬核打法不仅迎合了未来十年内智能电动汽车向AI汽车转型的大趋势,也有利于进一步培育小鹏不是制造企业而是科技企业的消费者心智。这个“业界首款L3级算力汽车”的宣传语,其目的当然在于争夺自动驾驶赛道的话语权,但毫无疑问的是,L3汽车接下来将成为头部车企寻求差异化的竞争热点,有鉴于此,我们顺着这个话题继续深思一下,所谓的L3汽车到底需要哪些必不可少的条件?
大算力芯片,多少TOPS是门槛?
《孙子兵法》有云:“兵之形,避实而击虚。”小鹏汽车这一次将L3级汽车的算力门槛设定在2000 TOPS,是在取师《孙子兵法》,以自己的优势资源攻击友商的薄弱环节,毕竟,除了蔚来之外,几乎所有友商都没有自己的超大算力芯片。不得不说,这个2000 TOPS的说法真的有些夸张了。如果真的以2000 TOPS作为判断条件,对于那些采用英伟达、地平线等厂商大算力芯片的友商来说,他们至少需要使用三颗单颗价格在一千美金左右的Thor-U才能达到小鹏设定的门槛,不过,三颗Thor-U对应的成本是三千美金,这显然是一个几乎所有车企都无法消化的负担。对于蔚来和小鹏汽车这两个率先做出了自家大算力芯片的难兄难弟而言,如果不考虑芯片设计成本的分摊,2000 TOPS算力芯片的成本大概在500-600美金之间,对于定价较高的L3级汽车而言,这倒是一个可以顺利腾挪消化掉的负担。

图片来源:小鹏汽车
虽说有了自己的芯片用起来就是豪横,但小鹏的说法有点偷天换柱之嫌。因为,即便在它的L3级算力汽车G7 Ultra上,也只有两颗图灵AI芯片用在了智驾系统上,第三颗图灵AI芯片被它用在了AI座舱里面。听其言更要观其行,按照小鹏的实践,其L3级算力对应的是两颗图灵AI芯片的算力,也就是1500 TOPS左右。
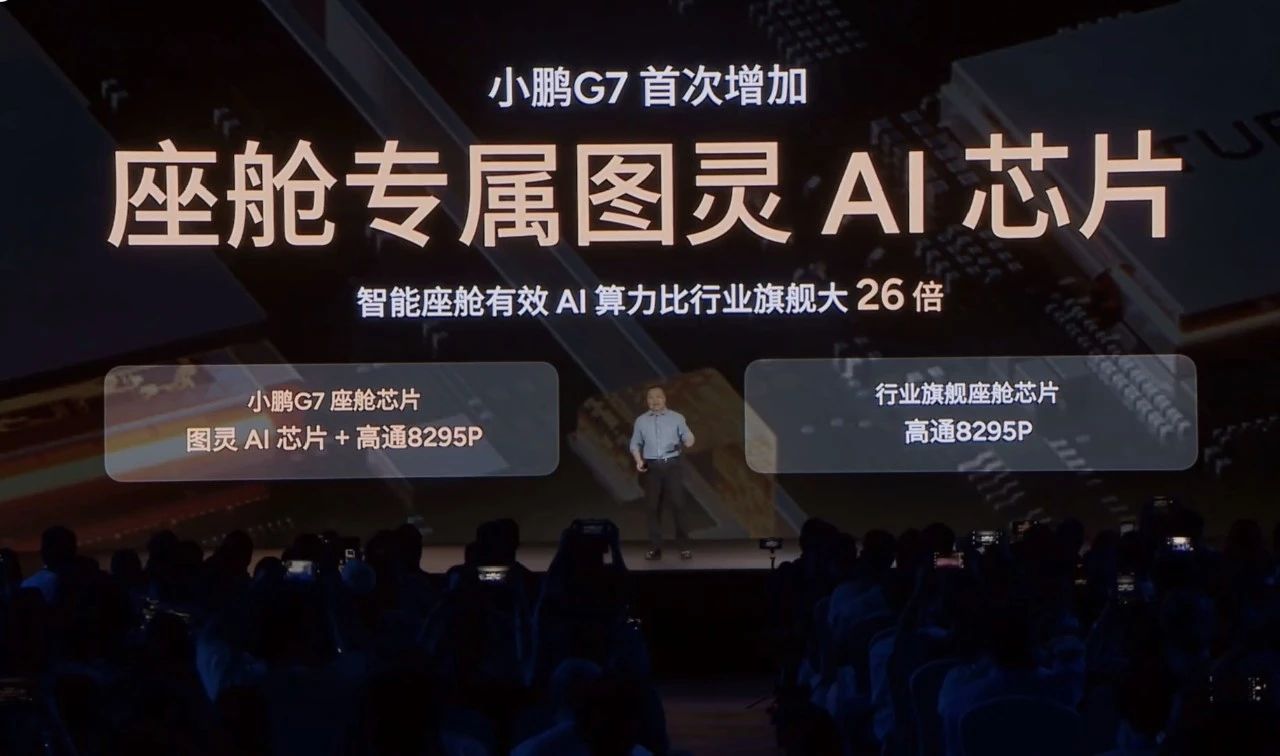
图片来源:小鹏汽车
不过,正如在目前的L2++辅助驾驶系统的阵营中,小鹏的图灵AI视觉方案采用了两颗英伟达Orin X,而Momenta、元戎启行这些供应商的方案采用了单颗英伟达Orin X+高线束激光雷达,通过具备3D能力的激光雷达有效地卸载视觉神经网络的算力负担一样,在L3级自动驾驶上面,小鹏汽车要用到1500 TOPS左右的算力,也跟它的强AI纯视觉技术路线密切相关。基于同样的逻辑,那些采用多传感器融合技术路线的车企或方案供应商,或许只需要使用700+TOPS算力的单颗英伟达Thor-U,就能在激光雷达的辅助下实现L3。

图片来源:小米
鉴于特斯拉FSD第四代硬件的算力为720TOPS,华为首个志在实现高速L3商用的尊界S800采用了双MDC810,算力为800TOPS,综合各路车企的实践来看,似乎可以确定,七八百T的算力应该就是L3级算力的下限,再低就无法在端侧部署在端到端模型之上引入大语言模型的VLA或世界模型了,至于算力的上限,今年年底上线的特斯拉FSD第五代硬件的算力据说高达5000 TOPS,这个数字或许将成为未来几年的天花板。
激光雷达,或许不是必要条件
通过反复强调激光雷达的安全冗余价值,打造“激光雷达=安全”的用户心智锚点,华为和理想们通过营销术语的反复强化,形成了三人成虎的传播效应,以至于在广大消费者的心中,激光雷达成为了L3级有条件自动驾驶的必备硬件。可是,在大洋彼岸有个显眼包叫特斯拉,其掌门人马斯克始终在强调自动驾驶要从第一性原理出发,并刚刚实现了以搭载纯视觉方案的量产乘用车Model Y运营L4级Robotaxi,这个啪啪打脸的消息无情地戳破了本土车企们精心构筑的谎言。

图片来源:CNBC访谈
我们当然不能否认激光雷达的安全价值,但也不应该过于强调它的不可或缺性。从理论上来看,激光雷达具备三维建模能力,可以提供极端环境的可靠性,但是,能够真正为安全兜底的绝非激光雷达或摄像头这些硬件,而是以大算力+大模型实现的智能。事实上,通过高HDR和LOFIC技术可以实现极端环境的感知,通过 Occupancy占用网络将环境分割成三维网格,可以实现类似激光雷达的点云建模效果,激光雷达并非不可或缺的。在最近半年的图灵AI视觉技术传播期间,在近期的发布会上,本土纯视觉路线的孤勇者小鹏都在试图扭转国内的舆论:传感器本身并不能成为L3的门槛,算力和模型决定的智能才是L3的核心标准。
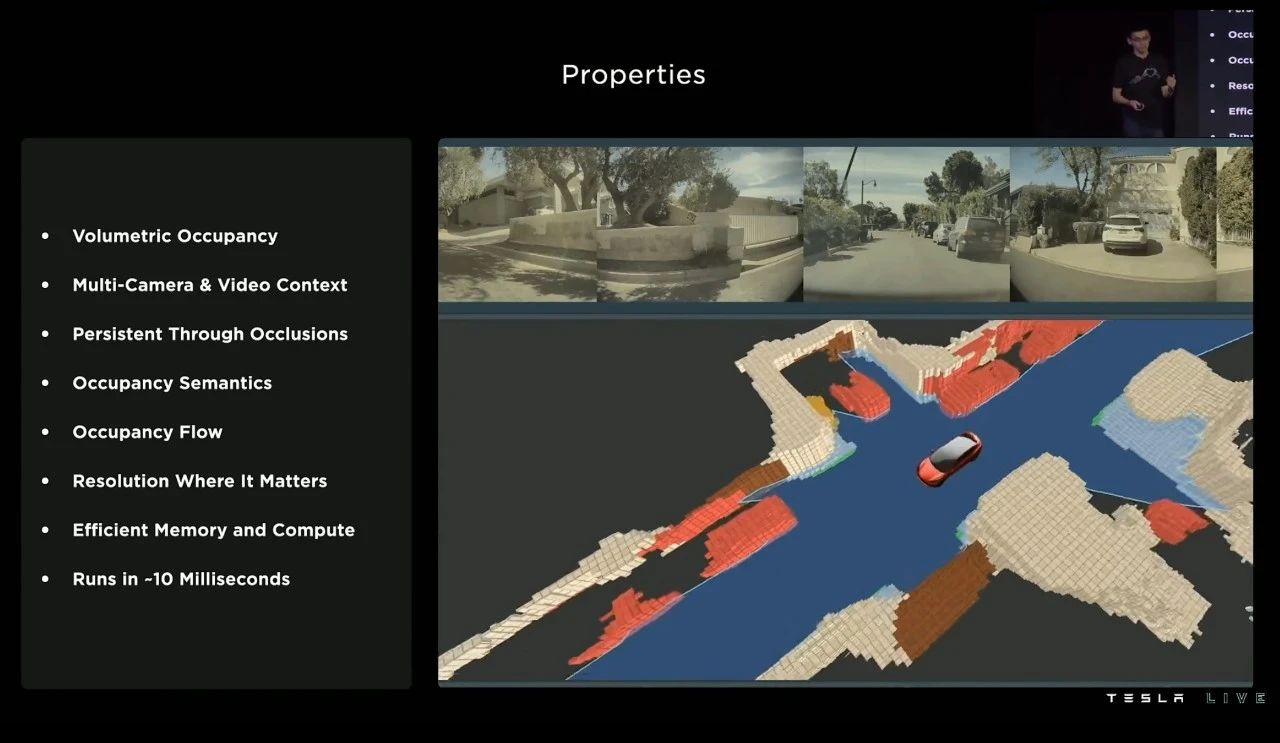
图片来源:特斯拉
不过,正如算力存在下限、不存在上限一样,能够在大算力+VLA大模型实现的智能之上多使用1颗或者几颗激光雷达也算“韩信带兵,多多益善”,一枝独放不是春,百花齐放春满园,正如纯视觉方案和多传感器融合方案在L2++组合辅助驾驶系统里各自绽放一样,两者也可以在L3级有条件自动驾驶系统的赛道里相得益彰。
冗余到底有没有必要?
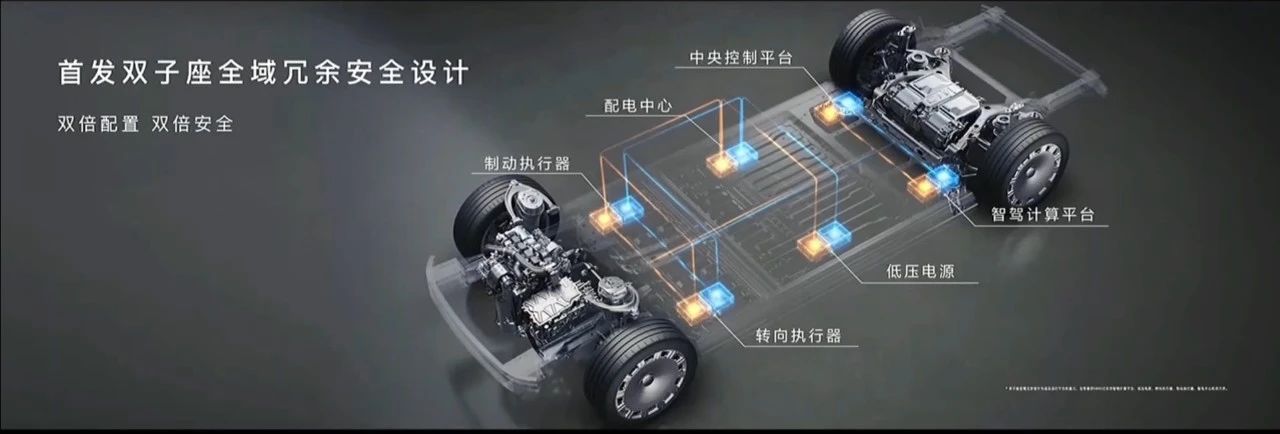
换个角度,L3级汽车需不需要激光雷达这个问题等同于L3级汽车要不要实现感知冗余。同样需要面对这个灵魂之问的不止是感知系统,还包括计算、制动、转向、供电、通信、驱动。如果按照过去半年中蔚来、华为们提出的L3原生架构和小鹏提出的L3级汽车方程式,包含驱动、制动、转向、电源、计算、感知(小鹏不包含感知冗余)、通信在内的整车冗余,是L3级汽车的必备他条件。
图片来源:华为
兼听则明,偏听则暗,还得看一看总是从第一性原理出发的特斯拉是怎样的做法。特斯拉用作Robotaxi运营的Model Y因为只搭载摄像头,所以没有感知冗余,不止如此,这款车的后驱版只有单个电机,也不具备驱动冗余,至于制动冗余、转向冗余、通信冗余,更是牛马不相及。这就意味着,在特斯拉的实践里,自动驾驶等级的高低与是否实现整车冗余压根就没有什么关系,以至于在特斯拉的参照下,华为、蔚来们拿冗余绑定L3,着实有捆绑销售的嫌疑,毕竟,多一个部件或许就能多收一个半部件的钱。不过,捆绑销售就捆绑销售吧,被价格战搞得精疲力尽的本土车企想赚点钱也不容易!
写在最后
站在自动驾驶的终局,可以运行端侧大模型的大算力芯片是L3级汽车的必要条件,至于激光雷达、整车冗余,都是锦上添花的充分非必要部件。当然,能够解决车辆在各种路面条件下安全行车的线控底盘、保证车辆在各种路面条件下行车舒适性的智能底盘或许也算是L3级汽车的必要条件。篇幅问题,底盘的问题且等以后再谈!






评论