数字控制电容电流反馈逆变器的建模与闭环设计

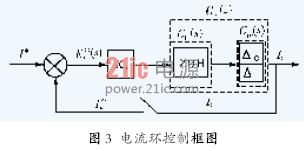
采用DSP控制后,系统是一离散系统,必须对Gpc进行Z变换。由此可得到内环电流环的离散传递函数为

根据朱利稳定判据[11],在忽略采样时间的情况下,如果采样周期为39 滋s(25.6 kHz),系统工作稳定的条件是
比例系数Kc=0.5 (5)
3 外部电压环的设计
把电流环作为内环,采用PI 可以得到电压外环的控制框图如图4所示。
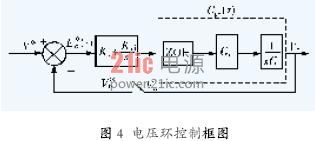
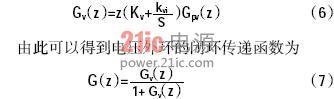
其中Gc为电流内环的传递函数。由框图可以得到电压环的开环传递函数为
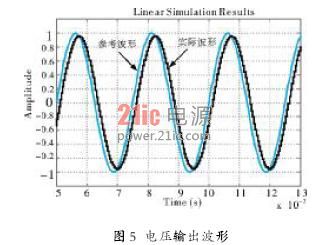
借助MATLAB,在输入正弦信号的情况下对系统输出的稳态误差进行仿真。理想情况下,希望稳态误差越小越好,但减小稳态误差就要增大系统的开环增益,而开环增益过大会导致系统的不稳定甚至发生振荡。通过仿真,我们得到的参数如下。
Kc=0.5
Kv=0.06 (8)
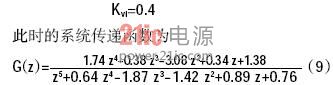
此时的幅值稳态误差约为3豫,对应的输出波形如图5所示。
4 实验验证
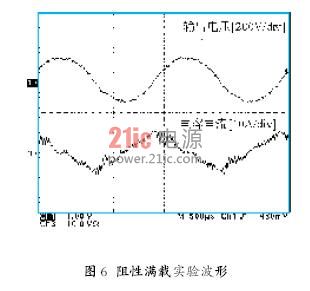
在理论分析的基础上,我们设计了一台400V·A的原理样机对闭环参数进行实验验证,输入直流电压180V,输出115V(有效值)/400Hz,开关频率25.6kHz,采样频率同开关频率,Lf越400 滋H,Cf=10 滋F,开关管采用
IXGH40N60C2D1,DSP采用TMS320f2812。图6为满载情况下的输出电压与电容电流波形。
5 结语
通过对逆变器的建模分析,选定了电容电流作为反馈量,提出了一种具有普遍应用前景的基于DSP全数字控制的闭环设计策略,电流内环根据稳定性来设计,电压外环根据稳定性和稳态误差来设计。最后进行了实验验证,实验结果证明该逆变器系统动态响应快,带非线性负载能力强,总谐波含量小,提出的闭环设计策略能够满足数字控制逆变器的控制要求,验证了闭环设计策略的有效性和普遍性。







评论