如何选用汽车LiDAR的激光器和光电探测器?

光学相控阵(OPA)技术,为第三种竞争扫描式LiDAR技术的方法,因其可靠的“无运动部件”设计而深受欢迎。它由光天线元件阵列组成,这些元件同样被相干光照亮。通过独立控制每个元件重新发射光的相位和振幅来实现光波转向,远场干扰产生一种理想的照明模式,从单光束到多光束。不幸的是,各种各样小元件的光损耗限制了其可用范围。
本文引用地址:https://www.eepw.com.cn/article/201712/373269.htmFlash面阵式LiDAR对场景进行光覆盖,尽管照明区域与探测器视野相匹配。在探测光学焦平面上的APD阵列即为探测器。每个APD均独立地测量ToF以实现该APD对目标特性成像。这是一种真正的“无运动部件”方法,其中切向分辨率被2D探测器的像素大小所限制。
然而,Flash面阵式LiDAR的主要缺点是光子预算:一旦距离超过几十米,返回光子的数量就太少,根本无法进行可靠的探测。如果不是对场景进行光覆盖,以牺牲切向分辨率为代价,用网格点状结构光来照明,这就可得到改善。垂直腔面发射激光器(VCSELs)使其可在不同方向同时发射成千上万的光束。
如何不受ToF限制
由于探测电子返回脉冲和带宽较宽的弱点,ToF LiDAR易受噪声影响,而阈值触发可引起测量误差Δt。基于这些原因,调频连续波(FMCW)LiDAR是一种有趣的选择。
在FMCW LiDAR(或chirped 雷达)中,天线连续发射的无线电波频率是调制的,例如其频率随着时间T从f0到 fmax线性增加,然后再随着时间T从 fmax到f0线性减少。如果反射波从某处的移动物体回到发射点,其瞬时频率将与发射瞬间的频率不同。差异来自有两个方面:一是与物体间的距离,二是其相对径向速度。因此可通过电子测量频率差异,并计算物体的距离和速度(见图3)来确定。
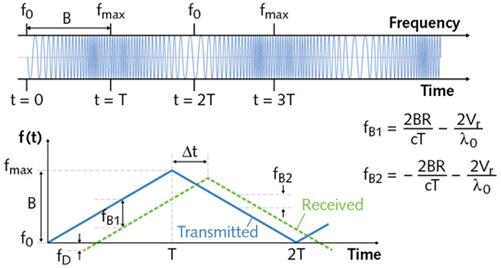
图3 在chirped 雷达中,通过电子测量 fB1 和fB2 ,可以确定反射物体的距离和它的径向速度
受到chirped 雷达的启发,FMCW LiDAR可用不同的方式接近被测物体。在最简单的设计中,可以对照亮目标的光束强度进行“啁啾chirp”(宽带线性调频)调制。该频率与FMCW雷达的载波频率遵守相同的规律(如多普勒效应)。反射回来的光被光电探测器检测到,然后恢复其调制频率。输出被放大,并与本机振荡器混合,以允许测量频率的变化,同时由此计算出目标的距离和速度。
但是FMCW LiDAR也有其局限性。与ToF LiDAR相比,它需要更强大的计算能力。因此,FMCW LiDAR在生成完整3D环境视图时,速度要慢一些。此外,测量的精度对啁啾斜线的线性度非常敏感。
尽管设计一套功能完善的LiDAR系统是非常有挑战性的,但这些挑战均是可克服的。随着研究的深入,我们正越来越接近“大部分汽车完成装配后就可以实现完全自动驾驶”的时代。

评论