如何选用汽车LiDAR的激光器和光电探测器?

大气衰减(在所有的天气条件下),从空气中粒子的散射,以及目标物理表面的反射,都是依赖于波长的。但对于汽车LiDAR来说,由于天气条件和反射表面类型可能性众多,这是一个复杂的问题。在现实的环境中,由于1550 nm的吸水率比905 nm的更强,其实905 nm的光损失更少。
本文引用地址:https://www.eepw.com.cn/article/201712/373269.htm光电探测器的选择
发射的脉冲中只有小部分光子到达了光电探测器的有源区域。若大气衰减不会随着脉冲路径发生变化,则激光的光束发散角可忽略不计,照明点小于目标,入射角度为零,反射为完全漫反射(Lambertian),那么脉冲光接收的峰值功率P(R)为:
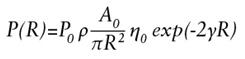
其中,P0为发射激光脉冲的光峰值功率, ρ 为目标反射率,A0为接收器的孔径面积,η0为探测光的光谱透射,γ为大气衰减系数。
上述方程表明,随着距离 R的增加,接收功率迅速降低。作为参数及R=100 m的合理选择,光电探测器有源区域上返回的光子数近超过典型值(发射1020次),为其几百到几千倍的数量级。而这些光子会与未携带有用信息的环境光子竞争。
使用窄带滤波器可减少到达探测器的环境光子数量,但却不能完全消除。环境可降低检测的动态范围和增加噪声(环境光子散粒噪声)。值得注意的是,在典型的条件下,地面太阳辐射照度在905 nm到1550 nm区间。
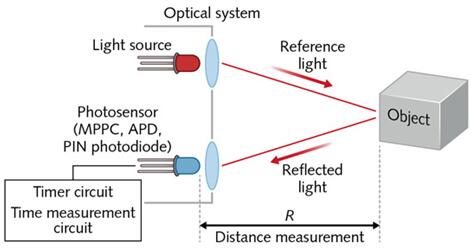
图2 飞行时间(ToF)LiDAR基本设置的详解
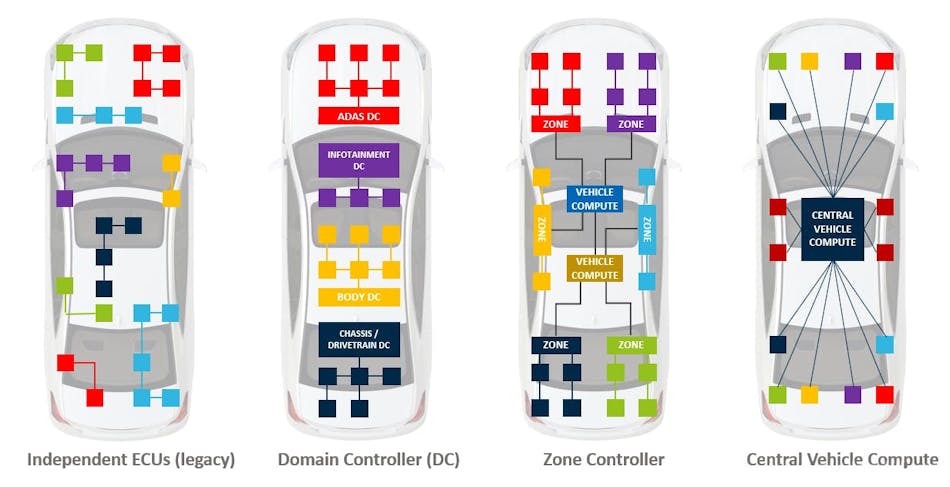
在汽车周围的创建360° x 20°的3D地图,需要光栅扫描单个/多个激光光束,或对场景进行光覆盖并收集点云数据。前一种方法被称为扫描式LiDAR,而后者是Flash面阵式LiDAR。
有几种方法可以实现扫描式LiDAR。第一种方法,以Velodyne(San Jose,CA)公司为例,安装在车顶的激光雷达平台以每分钟300~900转的速度旋转,同时从64颗905 nm激光二极管发出脉冲。每个光束都有一颗专用雪崩光电二极管(APD)检测器。类似的方法是使用旋转多面镜,在不同方位和下倾角度,以略微不同的倾斜角度来控制单束脉冲。在恶劣且复杂的驾驶环境中,这两个设计中的运动部件都暗藏着失败的风险。
第二种方法,使扫描式LiDAR变得更紧凑的方法是使用MEMS微镜,在2D方向上以电控制光束。虽然技术上仍存在一些运动部件(微镜也有振动),但振动幅度很小,且频率足够高,还可防止MEMS微镜与汽车之间的机械共振。然而,MEMS微镜的几何尺寸限制了其振荡幅度,因此采用MEMS微镜的LiDAR视野有限,这是MEMS方法的缺点。尽管如此,由于此种方法成本低、技术成熟,还是赚足了眼球。

评论