基于FPGA的惯导组合数据采集及控制系统设计

在系统设计中FPGA采用Xilinx公司的ISE软件进行编程,FPGA主要完成IMU,GPS数据的接收处理,PWM控制等功能。在系统中IMU,GPS数据通过电平转换电路连接至FPGA,FPGA通过不间断地检测IMU和GPS的数据头信息进行接收并进行相应处理,IMU,GPS数据接收的RTL实现图如图3所示。本文引用地址:https://www.eepw.com.cn/article/190676.htm
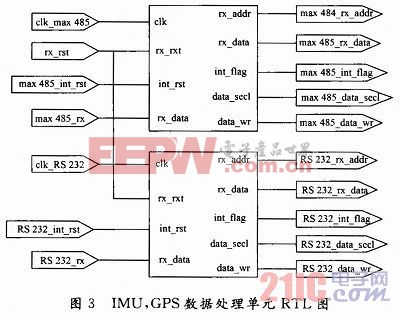
在系统中,IMU数据以RS 422接口形式提供,信息速率为115 200 b/s,由帧头、陀螺角速度信息、加速度信息、陀螺温度信息、加速度温度信息,时间信息和校验和组成。在工作过程中,FPGA首先检测是否接收到IMU数据的开始信息即帧头,如果没有接收到就一直进行检测,如果收到就接收并进行相应的处理和存储。接收完1帧IMU数据后,FPGA对这些信息进行累加校验,并将计算得到校验结果和接收到的数据校验信息进行比较,如果校验信息一致则存储该帧信息,存储地址自动加1,如不一致则丢掉该帧信息,存储地址不变。信息接收完成后,产生接收完成标志位。
GPS数据由卫星导航接收机以RS 232接口的形式提供,能实现机动载体的实时高精度三维定位、三维测速、精确定时。GPS数据的接收及处理原理和IMU数据类似,不同之处在于需要检测信息头和需存储的数据长度不同。
IMU和GPS数据均采用乒乓存储的方式进行存储,乒乓存储空间以帧为单位,最小空间为2帧,此时IMU和GPS数据在2帧的存储空间中交替进行存储。乒乓存储空间的大小可以根据需要进行改变,存储空间的改变由导航计算机通过串口进行设置,更改时无需重新编写下载软件。
PWM控制器根据需要由导航计算机控制,可以产生电机控制信号和任意占空比的PWM信号。为避免初始化不定状态对输出控制信号对电机的影响,由导航计算机对PWM控制器的输出信号状态进行控制。
3 仿真验证
惯导数据采集与控制系统采用Xilinx公司的ISE软件进行设计和验证。IMU数据和GPS数据通过计算机模拟产生,PWM控制信号由导航计算机通过串口提供,仿真验证结果如图4所示。

在该系统中,FPGA接收到IMU和GPS数据后存储在指定的存储空间内,IMU数据接收完成并校验通过后,产生接收完成标志0xAA55,GPS接收完成后产生0xAAAA标志,导航计算机通过读取这些完成标志来获取IMU和GPS数据。导航计算机读取完成后产生复位标志,此时,IMU和GPS数据的接收标志均复位为0x0101,仿真验证采用的IMU和GPS接收数据的乒乓存储空间为2帧。PWM信号的占空比由导航计算控制,验证采用的占空比分别为0,15%,50%,80%和100%。
4 结语
本文充分利用FPGA丰富的可编程资源,设计了基于FPGA的捷联惯导数据采集和控制系统,能够同时采集1MU数据和GPS数据,并能产生任意占空比的PWM控制信号。测试表明该系统能够保证惯导系统的运算速度和精度,且具有较丰富的外设接口,方便与导航计算机和外部传感器进行数据通信接口电路的设计,对惯导系统小型化及广泛应用具有实际意义。










评论