基于CMAC神经网络的PID参数自整定方法的研究

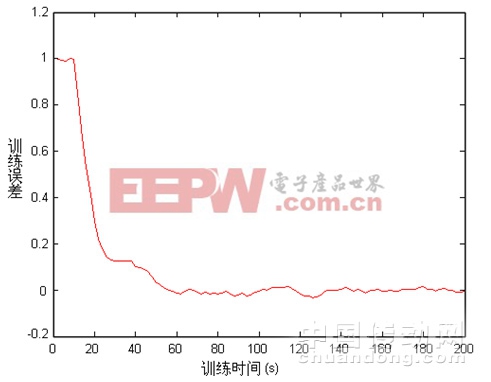
图5所示为1620组训练数据送入CMAC神经网络训练后,训练数据在各个误差区间中的个数,可看出超过90%的训练数据具有较高的误差精度,即误差精度0.1。
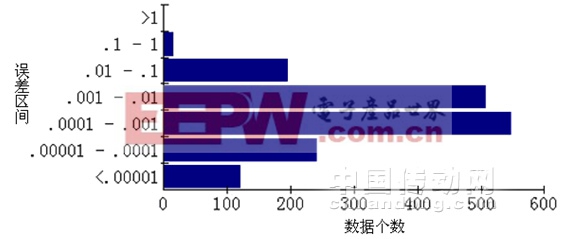
图5训练数据在各误差区间中的个数
Fig.5Numbersoftrainingdataindifferentsectionoferror
把选取的2000种特征参数模块中剩下的380组作为测试集,对训练后的CMAC参数整定网络进行测试。输出的控制参数变化值与学习样本期望结果进行对比,错误率为7.8%,说明CMAC网络训练比较成功,具有一定的泛化能力。图6所示为CMAC神经网络的测试误差曲线。图7所示为测试数据在各误差区间中的个数。
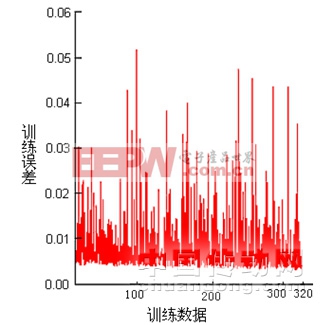
图6CMAC测试误差曲线
Fig.6TestingerrorcurveofCMAC
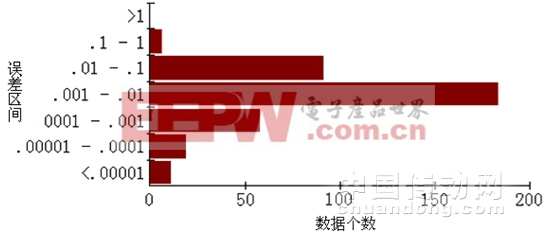
图7测试数据在各误差区间中的个数
Fig.7Numbersoftestingdataindifferentsectionoferror
5仿真结果
选取被控对象为: ,原控制器对此对象的控制性能达到要求,阶跃扰动曲线如图8中线1所示。当进行PID参数自整定,整定后的响应曲线为图8中线2,把特征参量送入CMAC参数整定网络,整定后参数为
,原控制器对此对象的控制性能达到要求,阶跃扰动曲线如图8中线1所示。当进行PID参数自整定,整定后的响应曲线为图8中线2,把特征参量送入CMAC参数整定网络,整定后参数为 。从仿真图中,我们可以看出PID参数的整定效果比较理想,且CMAC神经网络的达到稳定的训练时间也比较短。
。从仿真图中,我们可以看出PID参数的整定效果比较理想,且CMAC神经网络的达到稳定的训练时间也比较短。
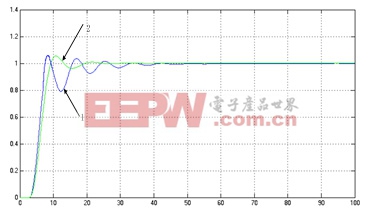
图8整定前后的响应曲线
6结论
仿真结果表明,CMAC神经网络的特性使其适合在PID参数自整定中使用。CMAC神经网络权值的调整是局部的,学习速度快,收敛性好,而且PID参数的整定效果也满足整定要求。文章的创新点:在基于模式识别的PID参数自整定系统中,直接利用CMAC网络获取整定规则,避免了传统的大量专家整定经验的建立。

pid控制器相关文章:pid控制器原理



评论