基于DSP和FPGA的三相异步电机矢量伺服系统

随着电力电子技术、微电子技术及交流伺服控制理论的发展,交流伺服驱动已经具有可与直流伺服驱动相比拟的性能,并且交流伺服传动技术已广泛应用于印刷、数控机床、食品包装、纺织、塑料、电子半导体等行业[1]。交流伺服传动系统的电机一般又分为交流永磁同步电机和鼠笼式交流异步电动机,在小功率范围交流永磁同步伺服系统有一定的优势但是在大功率伺服系统中,鼠笼式异步电机因结构简单、制造容易、价格低廉、应用范围广、过流能力大的特点而得到广泛应用[3]。笔者研制了一套基于ASIPM、现场可编程逻辑门阵列(FPGA)和专用的数字信号处理器(DSP)的鼠笼式三相异步电动机伺服系统,本文介绍了系统控制原理、硬件和软件的设计,通过实验对其进行了验证。
本文引用地址:https://www.eepw.com.cn/article/188488.htm1系统控制原理
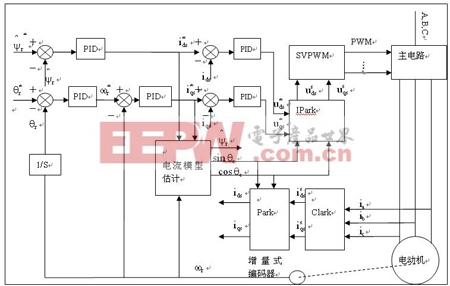
感应电动机的矢量控制通常按照定子磁链Ψs、转子磁链Ψr和气隙磁链Ψm来定向[6];根据磁链位置检测方式的不同,矢量控制可分为直接矢量控制和间接矢量控制。该系统采用定向于转子磁链Ψr利用转差关系来估计磁链相对于转子的位置的间接矢量控制,通过采用坐标变换实现对电动机定子电流的解耦;采用可在任何速度范围内使用的基于电流模型估计,即利用速度信号和电流信号估计转子磁链分量和[2]。
系统控制框图如图1所示。

2控制系统的硬件设计
以DSP为核心的伺服系统硬件如图3,整个系统的控制电路的核心由DSP+FPGA组成。


伺服电机相关文章:伺服电机工作原理












评论