基于变系数滑模观测器的PMSM伺服系统

3.2 转子位置估算

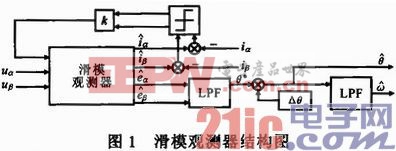
由于采用了LPF来获得反电势,不仅幅值发生了变化,同时也引入了相位延迟,导致所求的转子位置角度滞后一定角度。滞后角度与截止频率和电机转速有关。因此需要根据LPF的频率响应做一个相位延迟表,来获取运行时相应转速ω的相移角△θ,对
3.3 转速估算及转向判定
转速的估算可由转子位置的估算值得到,即
与转子位置获取相似,为保证转速估算值的平滑性,在其后加一个一阶LPF。滑模观测器的结构图如图1所示。
4 系统实现及实验
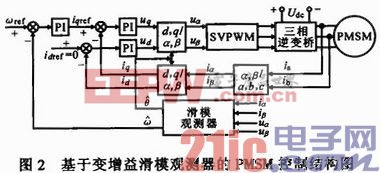
为验证设计的正确性和可靠性,设计了基于上述滑模观测器的无传感器PMSM伺服控制系统,其结构如图2所示,包括一个速度外环和两个电流内环。
系统采用dsPIC6010A作为控制器,PMSM的标称参数为:额定转速6 000 r·min-1,工作电压300 V,绕组相电阻12.5 Ω,绕组相电感0.58 mH,极对数为3。为便于观察参数的详细情况,通过串口与控制器进行通讯,并将控制器的各个参数、信号实时显示在上位机调试平台。












评论