基于单片机的无人机真空速测量系统设计

根据公式(4),对真空速公式的两部分分别进行处理。
首先对的Vi进行分段线性插值。插值节点个数可由线性插值余项来确定:

本设计中将插值计算的相对误差设为0.5%,则δ=400x0.000 5=0.2 km,
真空速公式的第二部分是气压高度H的函数式H’,在此不对H进行插值,而直接对H’进行插值。本设计中将插值计算的相对误差设为0.01%,则δ=1.2899×0.01%=0.012 899≈0.0013。M=max|(H’)”(Ph)|=.513×10-10,根据公式(9)可得,插值步长为
只要通过上述插值算法分别计算出动压相应值和静压相应值,然后相乘即得到实际真空速值。
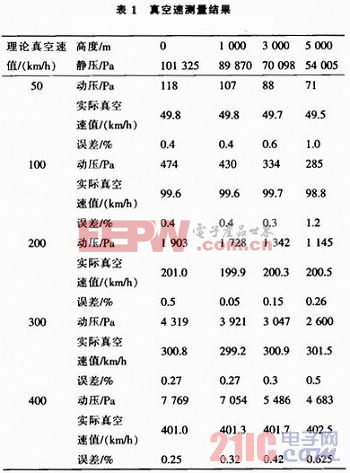
5 测试结果
表1是高度分别在0 m,1 000 m,3 000 m和5 000 m实时计算出的真空速实际值。从表中看出,实际真空速最大误差均不超过4%,能够满足设计要求。
6 结束语
文中设计的基于单片机的无人机真空速测试系统,电路简单,体积小,重量轻,性能稳定,能够实时、准确地测量出真空速值,适用于小型无人飞行系统。

接地电阻相关文章:接地电阻测试方法











评论