基于C8051F040单片机的承载平台平衡调整系统

液晶显示电路的设计
由于C8051F单片机不带LCD驱动,所以需要设计液晶显示驱动,12864M的CS,WR,DT,液晶显示驱动电路如图7所示。

图7 液晶显示驱动电路图
矩阵按键的设计
本系统总共需要16个按键,按键扫描电路如图8所示。

图8 按键扫描电路图
语音模块电路的设计
语音模块采用ISD1420芯片,语音电路实现录音和放音的功能,具体电路设计如图9所示。
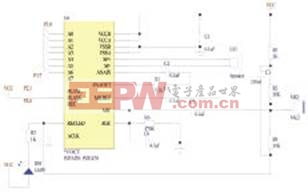
图9 语音电路图
系统程序设计
系统软件所实现的功能
该系统要完成对倾角传感器所传来的信号进行处理来控制运动物体的运行方向、计算运行物体的坐标位置、LCD数据显示和键盘控制等功能。归纳为以下两大功能:(1)对倾角传感器所采集的数据进行处理和运算,并输出到LCD显示。(2)对按键输入信号采集和判断,控制直流电机升降杆的位置。
系统软件流程设计
该系统软件设计由液晶显示子程序,语音播报子程序,按键扫描子程序和倾角调整子程序组成。系统主程序流程图如图10所示。

图10 系统主程序流程图
设计实现和功能调试
直流电机推杆速度测试
测试仪器:直尺(精度0.01m),量角器(精度0.1°),铅垂,秒表(精度10ms)。
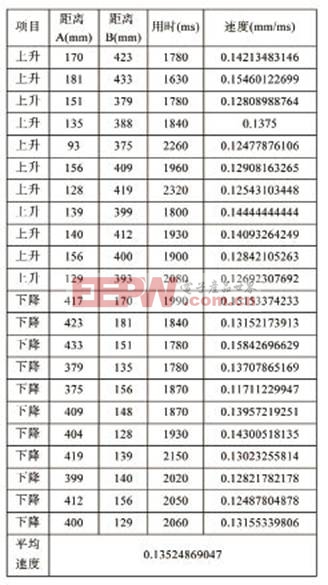
测试方法:首先测试推杆的最大升降速度,用直尺测量出推杆开始的距离值A点,电机两端加上24V电压,开始计时,记录下结束距离值B点和结束时间,计算出升降速度。表1的数据是多次测试取得的推杆平均速度,测试结果见表1。
表1 直流电机推杆速度测试结果记录表
角度调节精度测试
测试仪器:秒表(精度10ms),量角器(精度0.1°)。
测试方法:通过按键输入角度值,记录下时间后,通过液晶显示倾角传感器的倾角数值,与量角器测试的数值比较之后,记录下实际倾角数值后,比较得出该系统精度。测试结果见表2,经过测试得出该系统调角时间在5秒之内,精度控制在2°的误差。
表2 角度调节精度测试结果记录表

结束语
C8051F040是高度集成的混合信号SoC级微控制器芯片。承载平台平衡调整系统集成了C8051F040处理器、倾角传感器、ISD1420语音播报模块、人机交互界面等硬件电路。整个系统结构清晰,速度稳定,操作简单,成本低,经测试,该系统运行可靠,具有较好的应用前景。











评论