手术动力装置微电机的测功机的研究

模糊控制系统是2输入3输出系统。根据掌握的经验,共分7个等级。模糊控制器的设计必须通过多次修改模糊推理规则进行优化设计,并进行在线、离线的反复调试才能最后确定。经过长期人工操作经验的总结,并作出Kp、Ki、Kd的模糊推理表。
模糊推理设计采用Mamdani方法,分别用max和min实现OR和AND算子,用min实现蕴含关系,用max实现合成规则。清晰化方法采用重心法。通过重心法解模糊处理,得到量化值输出△Kp,△Ki,△Kd,实现PID3个参数的在线整定。
根据微电机-测功机模型分析,设控制对象的传函为
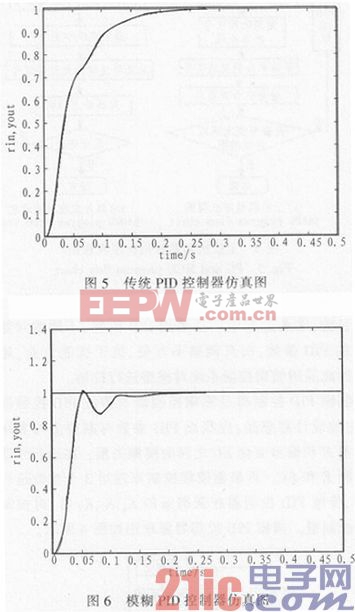
3 实验结果
根据实验室现有的设备,选用一台他励直流额定转速为25 000 r/min、额定功率为24 W的他励直流电机为测功机,图7为上位机采集到的数据。
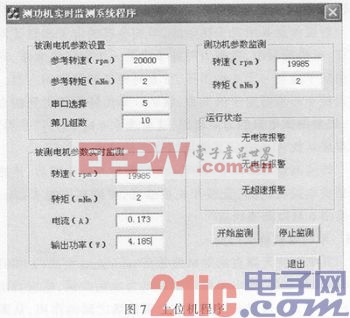
4 结论
经试验数据验证,测试结果与实际相符,测功机使用模糊控制PID算法使得响应迅速,不仅体积小、价格低、功能全、使用维护方便,无需人手操作,也可用于其它各种机械传动装置的转矩转速测量,为研究手术动力装置微电机提供了良好的条件。

pid控制相关文章:pid控制原理
pid控制器相关文章:pid控制器原理
电子负载相关文章:电子负载原理










评论