基于PID控制算法的智能小车设计方案

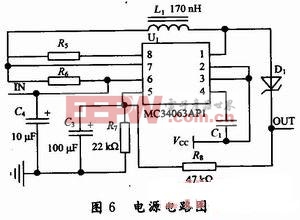
由于摄像头需要一个9~12 V的电压才能正常工作,而充电电池的电压只有6~7.2 V。所以DC-DC升压电路便成为必须。
DC-DC电压变换采用MC34063A集成电路,该器件内部集成了温度补偿器、比较器、动态电流带限占空比可控的振荡器和一个高电流输出驱动器。输出电压直接由两个外接的误差为2%的电阻控制。该电路可以方便地应用于升压和降压两种场合,电路原理图如图6所示。
6 软件设计
软件结构图如图7所示。
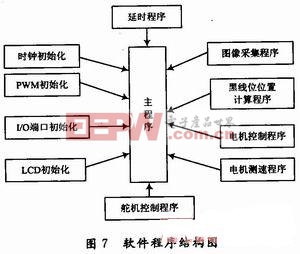
整个小车自动识别控制过程都是通过主控单片机芯片上的程序控制来完成整个智能控制过程。小车开启后将自动沿着有一定宽度的黑线轨道行驶,行驶中将连续检测到的黑线位置信息反馈给主控芯片,通过主控芯片处理后将执行结果反馈给控制器,进而控制小车前行方向,并通过软件检测小车速度及按键的更改信息最终将结果通过LCD显示屏显示。
7 结语
智能车设计涉及控制、模式识别、传感器技术、汽车电子、电气、计算机、机械等专业领域。整个设计没有采用过于复杂的检测方法或控制算法,而是采用了摄像头图像处理技术和经典PID控制算法,这样不但能保证系统的可靠性、稳定性与快速性,而且节省了成本与工作量。在控制算法上,PID控制保证了系统的快速和稳定;在检测方法上,摄像头连续检测的设计,保证了高速直线行驶的无抖动,以及光电管测速方法的应用,保证了测速系统的简单可靠。

pid控制器相关文章:pid控制器原理







评论