基于PID控制算法的智能小车设计方案

3 速度传感器
3.1 方案选择
(1)霍尔传感器配合稀土磁钢
优点:获取信息准确、体积小、不增加后轮负载。
缺点:齿轮出靠近主驱动电机,容易受磁场干扰,对齿轮打孔容易顺坏齿轮。
(2)光电传感器
优点:体积小、不增加后轮负载、反射型方案对原有器件不需要再加工。
缺点:精度受到光电管体积的限制。
(3)光电编码器
优点:获取信息准确、精度高。
缺点:增加后轮负载、体积大。
比较以上三种方案,考虑到系统的可靠性,主后轮转动齿轮为塑料质地,打孔比较危险,而且车重的任何增加都有可能影响到车速,最终决定采用直射型光电传感器。
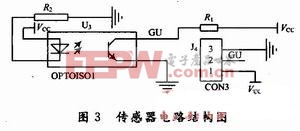
3.2 硬件电路设计
传感器电路结构图如图3所示。
4 驱动部分
4.1 电机驱动器选择
根据电机学和电力拖动理论,电机驱动器要有足够的电流输出能力来保证驱动力的充足。综合考虑,电机驱动器采用一体化的专用功率驱动集成电路进行设计分离元件(场效应管)构成的驱动器。
根据电机学,直流电动机转速,n的表达式为:

pid控制器相关文章:pid控制器原理







评论