基于MEMS器件的低成本微惯性导航系统设计

1.2 信号采集处理与传输模块
根据惯性传感器特性,在留有余度的基础上选用16位高精度A/D采集芯片ADS8344,其8个通道循环采样,转换速率可调且最大为100 kHz,采用SPI接口与CPU通信。考虑运算速度及方便使用,CPU选择ADI公司的ADuC842单片机,该单片机主频可达16.67 MHz,片上自带8路12位A/D,可用于温度传感器信号的采集,并完成陀螺和加速度计信号的读取、预处理以及温漂补偿等操作,最终通过RS 232与导航计算机通信。
1.3 导航计算机
捷联式惯性导航算法非常复杂,运算量很大,需建立“数学平台”以代替平台惯导的机械平台。为满足系统的实时性要求,选择台湾昭营科技的主频1.2 GHz,内存512 MB的嵌入式小型计算机eBox4850作为导航计算机,可以很好地满足要求。
2 信号预处理
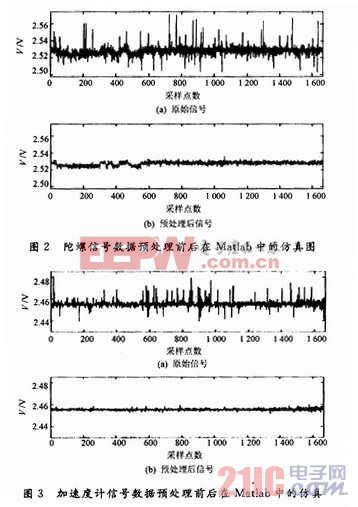
微惯性传感器,尤其是微陀螺技术目前还不是很成熟,低成本的MIMU在性能和精度上都存在较大的缺陷,野值比较明显,噪声水平也比较高。利用先前已在MEMS陀螺降噪方面所做的工作,在此先在单片机中对信号做预处理,再利用降噪算法在导航计算机中进行陀螺降噪,最后完成导航解算,以获得较好的处理效果。考虑单片机系统的处理能力及实时性,本文采用均值滤波算法做预处理,即对每组采集的7个数据,首先去除最大值x(1)和最小值x(7),剩余数据记为x(2),x(3),x(4),x(5),x(6);然后将x(2),x(3)的均值,x(3),x(4),x(5)的均值,x(5),x(6)的均值再平均后作为预处理后的输出数据。
目前已经广泛应用到众多导航设备中。姿态更新计算是捷联式惯导的关键算法,主要有欧拉角法、方向余弦法和四元数法。其中四元数法具有计算量小、精度高、可避免奇异性等优点,本文采用此方法作为姿态更新算法。图2、图3为陀螺及加速度计静态信号在数据预处理前后在Matlab中的仿真图,由图可见,均值滤波预处理算法效果较好,其中的奇异值基本消除。
3 捷联解算(SINS)
在此设计的捷联式惯性导航系统工作原理图如图4所示。将MEMS陀螺和MEMS加速度计直接固联在运载体上,通过导航计算机依靠算法建立导航坐标系,即平台坐标系以数学平台形式存在,省略了复杂的物理平台,具有结构简单、体积小、重量轻、成本低等优点。本文引用地址:https://www.eepw.com.cn/article/162532.htm
3.1 姿态矩阵
设导航坐标系为n,运载体坐标系为b,俯仰角δ、横滚角θ、航向角φ,由导航坐标系至运载体坐标系的姿态变化矩阵为:

3.2 四元数即时修正及归一化
设载体坐标系相对导航坐标系的转动四元数为公式(1),其中Wx、Wy、Wz为经过补偿后的3轴捷联MEMS陀螺输出。
在更新过程中,由于存在计算误差,姿态矩阵成为非正交阵,因此需要正交化处理以消除非正交引起的算法误差,处理方法为用式(3)中的替换Q中的相应qi即可。













评论