5 结语
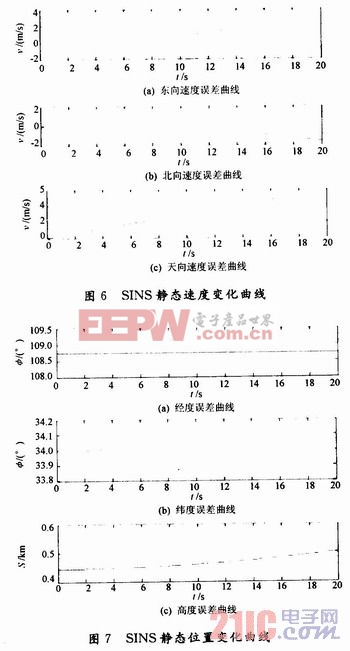
在此首先介绍了采用MEMS惯性传感器设计的微惯性测量单元。由于选用的微惯性传感器精度比较低,信号存在较大的噪声,个别点出现野值现象,所以引入信号预处理。根据陀螺及加速度计测量的实时信息,通过“四元数”法,完成导航解算,输出运载体的航向速度及位置信息。分析实验结果可知,此系统短期精度较高,但误差随时间发散非常快,为保证长时间使用,可以采用SINS/GPS组合导航方式,通过卡尔曼滤波来抑制发散,提供测量精度,这也是我们以后工作的重点。
本文引用地址:https://www.eepw.com.cn/article/162532.htm














评论