基于MEMS器件的低成本微惯性导航系统设计

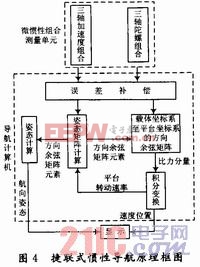
3.3 姿态矩阵的计算
经过式(2),式(3)实时计算出四元数后,由对姿态矩阵更新计算,再通过即可获得载体更新的姿态角。

3.4 速度位置的计算
加速度测量的比力信息fx,fy,fz,通过姿态矩阵转化到导航坐标系后记为Fx,Fy,Fz,转换由式(4)确定。东北天方向的速度VE,VN,VU由对加速度做积分运算确定,经度λ、纬度φ高度h由对速度做积分运算确定,分别见公式(5),式(6)。
 本文引用地址:https://www.eepw.com.cn/article/162532.htm
本文引用地址:https://www.eepw.com.cn/article/162532.htm![]()
4 实验结果及分析
为了测定所设计的低成本捷联式惯性导航系统的性能和精度,进行了大量的实验室静态测试,图5,图6,图7为原理样机实时运行20 s的静态测试结果。由图可知,样机静态运行15 s,姿态误差最大为1.2°,速度误差最大为4.5 m/s,位置误差最大为33 m。分析实验结
果可知,样机运行在较短时间内,捷联解算结果良好。但是长时间运行,误差发散比较严重,主要原因有2个,其一是考虑低成本设计,所选用的MEMS惯性传感器精度比较低,与普通导航所用的惯性传感器精度有数量级的差距;其二,选用的导航方式为捷联式惯性导航,而捷联式系统为发散系统,本身误差有积累效应,时间越长误差越大。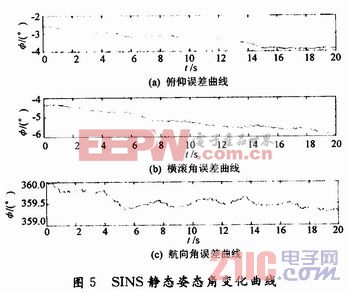













评论