基于ARM的电脑鼠走迷宫的研究

2.4 传感器模块
2.4.1 传感器模块组成
传感器模块采用红外传感器:红外线发射对管SIR563ST3F和IRM8601S,红外线收发对管IR204和PD204-6B。红外线发射管SIR563ST3F最大辐射角约为30°,工作中心频率38 kHz;红外线接受管IRM8601S为一体式红外线接收头,最佳工作波长940 nm。可以通过设置不同的发射频率来实现用一个红外传感器完成远距和近距探测的功能。红外线发射管IR204和红外线接收管PD204-6B工作波长均为940 nm,它们固定在两轮内侧,并在轮内贴上黑白码盘,码盘随车轮的转动而转动,当传感器正对着码盘黑色条纹时,输出高电平,反之低电平。通过GPIO口中断检测电平变化,就可以计算并记录电脑鼠行走的距离。
2.4.2 传感器模块功能
(1)路程检测。由安装在两轮内侧的红外线收发管IR204和PD204-6B,对黑白码盘条纹进行计数,按照迷宫单元的长度为单位进行路程计数,以记录电脑鼠在迷宫中的方位坐标,同时还可以精确地实现转弯。
(2)岔口检测。岔口检测由安装在正前、左前、右前的3个红外线发射对管SZR563ST3F和IRM8601S实现,工作波长940 nm,实现远红外测距功能,探测前、左、右有无障碍。
(3)姿势修正。姿势修正由左右2个红外线发射对管SIR563ST3F和IRM8601S实现,发射信号约30.5 kHz,实现近红外测距功能,保持电脑鼠在中轴线附近行走,避免撞击迷宫。值得注意的是,在转弯过程中不要进行姿势修正,这样有可能导致转弯的角度出现偏差,即电脑鼠只是在前进的过程中才进行姿势修正。
2.5 电机控制模块
电机控制模块主要负责控制电脑鼠的运动,包括电机和电机驱动电路两部分。电机为两个两相四线制步进电机,工作电压为7.4 V。电机驱动芯片采用BA6845FS,每个芯片包含2个H桥,它的最大驱动电流为1 A,且在输入逻辑的控制下输出有3种模式:正向、反向和停止。
3 电脑鼠软件研究与实现
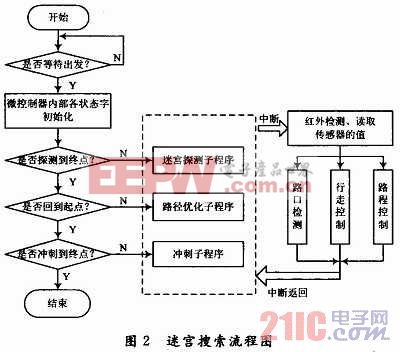
电脑鼠的软件部分主要用来检测迷宫环境,传送控制信号给相应的硬件模块,对在迷宫中行走的电脑鼠进行制导与导航。其主要由迷宫搜索主程序和其他实现各种功能的子程序组成,主程序主要起到搜索探测迷宫和决策功能,而其他各种功能则是通过调用其相应子程序来实现的,搜索流程如图2所示。本文引用地址:https://www.eepw.com.cn/article/162073.htm










评论