基于红外光电传感器的智能寻迹小车设计

2.5 车速检测模块
为了使智能车能够快速平稳地跟踪引导线运行,除了要控制前轮转向舵机外,还需要控制车速,以便调整智能车在直道和弯道上的行驶速度。微控制器通过车速检测模块获取智能车的实时速度并给予电机驱动模块反馈信号,以实现对智能车车速度的闭环控制。
系统采用霍尔传感器进行车速检测,霍尔车速传感器由8级磁钢、UGN-3030T型霍尔开关传感器、LM2917及放大电路组成。将自制的沿圆周均匀嵌入8粒磁钢片的圆盘,固定在智能车后轮轴上,智能车运行时,车轮每转动一周,由于磁场变化使得霍尔传感器产生8个脉冲信号,经放大电路处理输出到频率/电压转换器LM2917,由MC9S12DG128B的A/D转换器根据LM2917输出电压即可计算出当前智能车车速。
2.6 液晶显示模块
液晶显示模块用来实时显示当前车速。系统选用字符型液晶显示屏1602来显示数据,1602和单片机的接口十分简单,SD0~SD7为数据端,EN为使能端,RW为读/写选择端,RS为数据/命令选择端。
2.7 电源模块
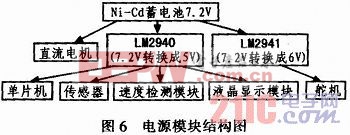
电源模块为智能车系统的其他电路模块提供稳定的直流电源,它的好坏关系到整个系统是否能够正常工作,因此电源模块的设计十分重要。系统采用7.2 V 2 000 mAh Ni-Cd电池进行供电,但由于电路中的不同电路模块所需要的工作电压不同,因此电源模块应该包含多个稳压电路,将充电电池电压转换成各个模块所需要的电压。
MC9S12DG128B的工作电压为5 V,光电传感器的工作电压为5 V,直流电机的工作电压为7.2 V,舵机的工作电压为6 V,速度检测模块的工作电压为5 V,液晶显示模块的工作电压为5 V。故需将7.2 V电压转换成6 V和5 V。
系统选用LM2941稳压芯片将电压转换成6 V给舵机供电,选用低压差线性稳定器LM2940将电压转换成5 V给MC9S12DG128B单片机、光电传感器、速度检测模块、液晶检测模块供电,直流电机直接由电池供电,电源模块结构图如图6所示。
3 结语
本文对基于红外光电传感器的智能寻迹小车系统进行了分析与设计。着重介绍了智能车的控制器模块、路径识别模块、电机驱动模块、舵机驱动模块、车速检测模块、液晶显示模块以及电源管理模块等七部分的硬件电路设计,并给出了部分模块的控制框图及软件流程图。实际结果表明,该小车可以快速平稳地实现寻迹功能。












评论