基于红外光电传感器的智能寻迹小车设计

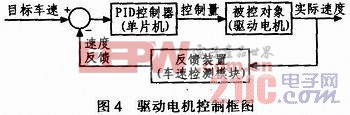
驱动电机控制框图如图4所示。为了提高智能车运行的稳定性,采用PID算法实现直流电机的转速闭环调节,PID控制器的输入量为目标车速与实际车速的差值。本文引用地址:https://www.eepw.com.cn/article/161675.htm
2.4 舵机驱动模块
智能车的运行方向并不是一直不变的,它应跟随引导线方向的变化而变化,智能车采用前轴转向方式,即将舵机输出盘固定在赛车前轴的中点上,利用舵机转动带动智能车转向,因此转向舵机的控制在智能车控制系统中十分重要。
系统采用的是日本双叶公司生产的Futaba S3010模拟电路控制舵机,该舵机的输入电压为4.8~6 V,舵机的控制信号是PWM信号,PWM控制信号的周期为10 ms,其高电平的宽度决定舵机输出舵盘的角度。如果只使用单个8位PWM通道,精度为1/255,舵机的转向角细分精度不能满足转向需要。而将两个8位的PWM通道合并为一个16位的PWM通道,舵机的转向精度就可达到1/655 36,控制精度得到大幅提高。舵机模块的硬件电路比较简单,由MC9S12DG128B的PWM0、PWM1两路8位PWM通道组成一路16位的PWM通道接在舵机控制线上,即能使舵机在±45°范围内转动。
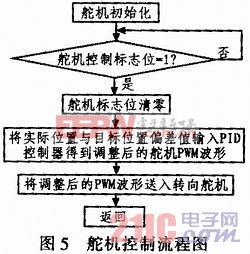
在小车运行过程中需不断调整转向舵机,在程序编写中,每10 ms对舵机进行一次控制,设置一个舵机控制标志位,在定时中断程序中置位(每10 ms置位1次),在舵机控制程序中清零。舵机控制流程图如图5所示。












评论