基于红外光电传感器的智能寻迹小车设计

2.2 路径识别模块
单片机通过路径识别模块对路径信息进行采集,以实现小车寻迹的功能。系统选用RPR220型红外反射式光电传感器设计了路径识别模块。RPR220是一种一体化反射型光电探测器,其发射器是一个砷化镓红外发光二极管,接收器是一个高灵敏度硅平面光电三极管。红外发射管发出的红外光在遇到反光性较强的物体(表面为白色或近白色)后被折回,并被光电三极管接收到,引起光电三极管光生电流的增大,将这个变化转为电压信号,就可以被处理器接收并处理,进而实现反光性差别较大的两种颜色(如黑自两色)的识别。
光电传感器检测电路原理图如图2所示,当发光二极管发出的光被反射回来被接收管接收时,三极管导通,此时构成电压比较器的LM324的同相输入端电压约为0,LM324的反相输入端电压取决于可调电阻R3的有效阻值,当同相输入端的电压低于反相输入端的电压时,LM324输出高电平,即Out为1,反之当发光二极管发出的光没被反射回来时,LM324输出低电平,即Out为0。电压比较器的灵敏度可以通过调节可调电阻R3来实现。本文引用地址:https://www.eepw.com.cn/article/161675.htm
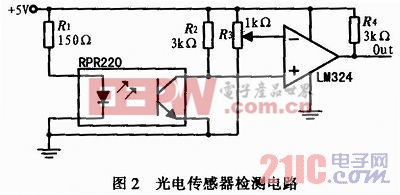
智能车采用8对RPR220型红外光电传感器作为路径识别元件,将其等间距安装在智能车前部的传感器板上,间距约为25 mm。在一定的对地垂直高度下,由于白色赛道和黑色引导线对于红外线的反射强度不同,不同位置处红外接收管接收到的红外光强会存在较大差异。因此通过单片机读取LM324的输出电平就能检测出黑线位置,从而判断行车方向。
2.3 电机驱动模块
系统选用工作电压为直流7.2 V的RS-380直流电机提供动力,电机驱动模块是控制小车驱动电机加速运行与减速制动的核心,因此驱动芯片的选择十分重要。系统选择了飞思卡尔公司的MC33886集成H桥驱动芯片。作为一个单片电路H桥,MC33886是理想的功率分流直流电机和双向推力电磁铁控制器。它工作电压从5~40 V,能够控制连续感应直流负载上升到5.0 A,PWM信号频率可达10 kHz;内部集成短路保护、欠压保护、过温保护等模块,安全性高;两路独立输入控制两个半桥的推拉输出电路的输出,两个无效输入使H桥产生三态输出。
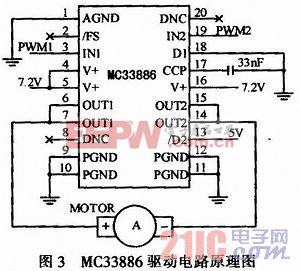
MC33886驱动电路原理图如图3所示,将单片机的两路PWM输出接到MC33886芯片的IN1、IN2脚,通过改变两路PWM波的占空比控制电机两端电压,调节直流电机转速的快慢,从而实现正转、正转制动、反转、反转制动。












评论