模块化机器人嵌入式多核主控制器设计

摘要:针对模块化机器人控制,提出一种基于FPGA的片上多核主控制器设计方案。利用SOPC技术在单一芯片上设计两个完全不同结构的核心:NiosII软核处理器和协处理器。详细介绍了机器人控制的路径规划流程、NiosII软核体系、协处理器的构架及接口以及基于SOPC的片上多核系统实现。实验结果验证了多核主控制器设计的可行性。
本文引用地址:https://www.eepw.com.cn/article/160565.htm关键词:模块化机器人;多核控制器;协处理器;NiosII软核处理器
引言
随着科技的进步,机器人技术正在向智能机器和智能系统的方向发展,其发展趋势主要为结构的模块化和可重构化;控制技术的开放化、可配置化;伺服驱动技术的数字化和分散化;多传感器融合技术的实用化。机器人的内涵也已变为“灵活应用机器人技术的、具有实在动作功能的智能化系统”。近十几年来,FPGA行业也在飞速的发展,它在实际科研开发中的地位也从处理简单逻辑上升到了数字系统的核心处理器件。SOPC(可编程片上系统)技术的出现,使得将CPU核与设备核以及系统软件集成到单一芯片中成为可行,它能够帮助用户快速开发出所需要的产品。
本文结合实际项目以一个固定基座的单臂六自由度机器人作为研究对象,提出一种基于FPGA的模块化机器人嵌入式多核主控制器设计方案。
1 机器人路径规划
设机械臂初始和终止位姿分别记为:Xe0=[Pe0,ψe0],Xef=[Pef,ψef]。要求机械臂末端手爪沿Xe0到Xef的直线路径运动,起点和终点分别为Pe0(x0.y0,z0,α0,β0,γ0)和Pef(xf,yf,zf,αf,βf,γf),机器人手抓运行轨迹如图1所示。
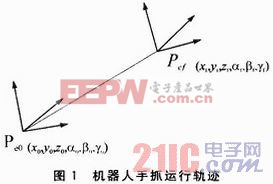

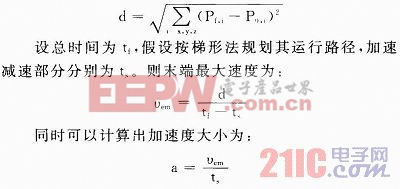
由初始点和终止点坐标计算出首末端直线距离长度为:
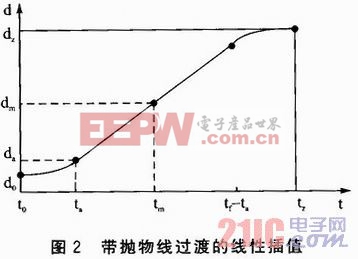
对于一个路径段,由于两端的过渡域具有相同的持续时间,因而在这两个域中,采用相同的恒加速度值,只有符号相反,带抛物线过渡的线性插值如图2所示。






评论