模块化机器人嵌入式多核主控制器设计

在求解加速度的基础上可以得出末端运行线速度,末端线速度分为加速段、匀速段和减速段,其具体表达式为:

在得到了线速度和角速度之后就可以通过雅克比矩阵得出各个关节的关节角速度,再乘以固定的时间即可得出在每一步的关节转角。
2 Nios II软核体系结构
Nios II是Altera公司的第二代用户可配置的通用32位RISC软核处理器,是Altera公司特有的基于通用FPGA架构的CPU软核。它具备完整的32位指令集、32位数据通道和地址空间;带有32个通用寄存器;支持32个外部中断源;单指令的32位与32位乘法和除法结果是32位;对于结果为64位或128位的乘法,提供专用指令;大多数指令可以在一个时钟周期内完成;带有单指令桶形移位寄存器;可以访问各种片上外设,提供与片外存储器和外设的接口;处理器性能超过200 DMIPS。
Nios II是一个可配置的软核处理器,用户可以根据性能和成本的要求来增加或删减处理器的功能。Nios II处理器不像ARM那样是由固定的芯片来实现,而是采用IP核的方式实现的,可以配置在满足任何要求的AlteraFPGA器件中,因此,Nios II处理器给实际应用带来了很大的灵活性。只要芯片上有足够的空间,就可以不断进行升级而不用修改电路结构。另外,Nios II处理器作为一个标准的RISC处理器,具有执行标准的C源代码和程序的可移植性强等特点。
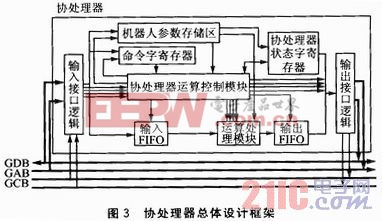
3 协处理器结构
由于模块化机器人的控制需要进行大量复杂的三角函数运算以及矩阵运算,单一Nios II软核处理器在完成这些运算的同时并不能保证控制的快速性、实时性要求。因此本文设计一个专用的IP软核作为协处理器,用来进行各种机器人运动学的解算。






评论