模块化机器人嵌入式多核主控制器设计

5 实验及结果分析
实验系统包括基于FPGA的嵌入式多核主控制器、机器人关节控制器以及单臂六自由度机器人等。运动学正解运算性能时间对比如表2所列。在保证控制准确、有效的前提下分别采用单Nios II软核处理器与协处理器进行运动学正解运算。单Nios II软核处理的耗时约为2900
μs,而多核主控制器的协处理器只需要约10μs的时间。可以看出在相同系统时钟下,协处理器进行运动学正解比单Nios II软核处理器的效率提升了两个数量级。
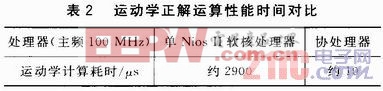
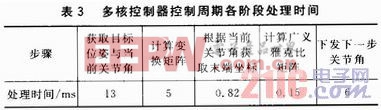
表3列出了一个控制周期(多核主控制器采用路径规划算法控制机器人从空间中一点到下一点)内各阶段的处理时间,整个控制周期所需时间约为24.97 ms,比之前单独采用Nios II软核处理器控制的100ms节约了大概3/4的时间。而且,用于CAN总线通信及数据采集的部分(获取目标位姿与当前关节角、下发下一步关节角)所占用的时间为整个周期的76%。由此可以看出,该设计能极大地提高系统处理能力,并能够很好解决嵌入式控制器运算能力对模块化机器人控制系统的约束问题。
6 结论
本文对基于FPGA的模块化机器人嵌入式多核主控制器进行了研究,重点讨论了路径规划方法,分析了NiosII软核体系结构;并对协处理器结构设计、片上结构设计做了详细介绍。最终实验结果也表明了该设计的可行性以及控制的快速性。在更改机器人结构的时候,只需要分析连杆坐标系,获得D-H参数并传递给协处理器,该多核主控制器仍能可靠有效地工作。
linux操作系统文章专题:linux操作系统详解(linux不再难懂) 电容式触摸屏相关文章:电容式触摸屏原理





评论