模块化机器人嵌入式多核主控制器设计

协处理器总体设计框架如图3所示。GDB、GAB、GCB分别表示外部的数据、地址和控制总线。协处理器主要包含输入/输出接口逻辑、机器人参数存储区、协处理器运算控制模块、运算处理模块、命令字寄存器、协处理器状态字寄存器和输入/输出FIFO构成。
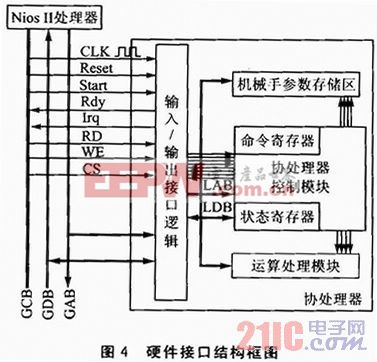
在本设计中,协处理器作为一个I/O设备与主处理器之间连接,协处理器完全接受主处理器的调度和支配。由于机器人控制算法的调度与计算是一个周期性过程,因此采用I/O设备方式即可满足要求。采用此方式系统虽然增加了协处理器,但却没有增加复杂度,利于保证核心部件的可靠性且易于实现和管理,能够简化软件设计。针对该接口模式的设计,协处理器与主处理器之间的硬件接口结构框图如图4所示。
协处理器面向Nios II处理器接口分为参数区和寄存器区,通过写命令寄存器来识别。通常情况下,给出的CMD为正常计算模式,默认选择寄存器区;当需要对基本参数进行访问/修改时,给出的CMD为修改参数模式。其中寄存器区包括各类寄存器和输入输出FIFO。图4中各信号含义在表1内进行了介绍。
4 片上多核结构
利用SOPC技术把Nios II软核、专用协处理器、存储器控制IP、CAN总线控制逻辑、内部计数器等全部集成到FPGA芯片上。基于SOPC的多核控制器的系统结构如图5所示。
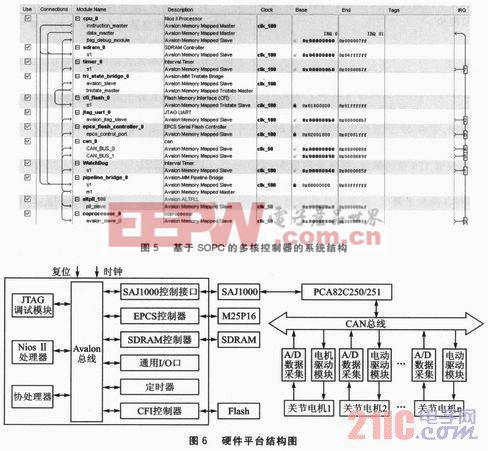
整个分布式控制系统结构如图6所示,多核主控制器通过CAN总线与各关节控制器通信并对反馈信息进行处理,进行路径规划,下发关节角。各关节控制器采集电机当前角度信息并通过电机驱动模块控制电机运动。
linux操作系统文章专题:linux操作系统详解(linux不再难懂) 电容式触摸屏相关文章:电容式触摸屏原理





评论