基于FPGA的模糊PID控制器设计

在QuartusⅡ中对仿真参数进行设置,将仿真向量文件指向由Matlab生成的*.vec文件,即可将Matlab中生成的仿真信号导入QuartusⅡ进行仿真。将仿真结束后生成的波形文件(*.vwf格式),另存为*tbl格式文件,以便将仿真结果导入Matlab中进行验证。*tbl文件如下:
以数据文件输入的方式将此*.tbl文件中的QuartusⅡ仿真输出信号的数值导入Matlab中,既可以分析模糊PID设计的正确与否,也可以分析其性能优劣。
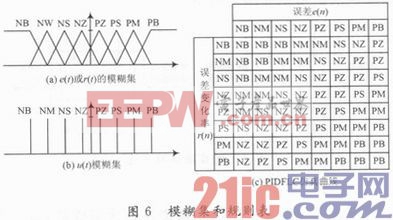
下面以基于软件的模糊PID控制器(Software Bulid Controller,SBC)与基于FPGA的模糊PID控制器(FPGA Bulid Controller,FBC)做比较。在仿真中对称三角模糊集和单值模糊集分别用于输入和输出变量,此外还应用图6中所示的64个模糊规则的规则表。本文引用地址:https://www.eepw.com.cn/article/159601.htm
将两种模糊PID控制器用在图1所示的控制系统中,并输入0.5 V的阶跃信号。选择的受控对象是工业控制对象中的典型模型,如直流电机位置控制等。模型的离散使用的是ZOH法。离散传递函数如下:
![]()
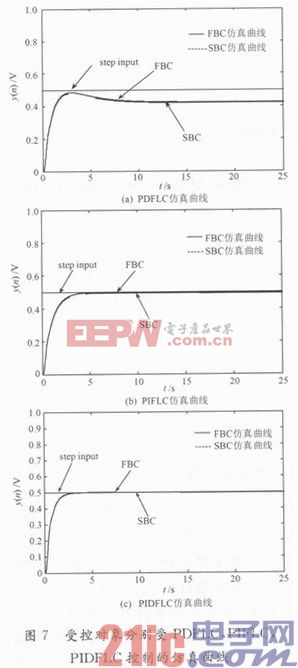
式(6)的采样周期T=0.25 s。采用FBC和SBC进行仿真比较。因为每一个控制器均能作为PDFLC,PIFLC或PIDFLC使用,所以给出了3种控制器的仿真结果。图7为受控对象受PDFLC,PIFLC和PIDFLC控制时的阶跃响应的仿真曲线。
3 结语
针对以传统方式实现模糊PID控制器时,各输入变量均需要建立模糊控制器模块,且需要大量的规则库,提出了改进的模糊PID控制器,以PDFLC代替PIFLC,用两个PD模糊控制器实现模糊PID控制器,并利用FPGA实现。采用Matlab与QuartusⅡ联合仿真,比较了基于FBC和SBC的仿真结果,表明基于FPGA的模糊PID控制器,响应时间和控制效果较为理想,验证了设计方案的正确性和可行性。

pid控制器相关文章:pid控制器原理








评论