喷浆机器人电液伺服系统的模糊自适应整定方法
1 引言
喷浆机器人是用来在矿山巷道支护中进行自动喷射混凝土的机械电子装置,是一个高度非线性、强耦合和变参数的多变量系统,其主要控制系统是一个由微机控制的电液伺服系统。电液伺服控制可实现位置控制、速度控制、压力控制和同步控制,由于其显著优点及易于实现自动化的特点,而被广泛应用于工业领域且发展迅速。电液伺服系统综合了电气和液压两方面的特长,具有体积小、质量轻、响应速度快、输出功率大、控制精度高、信号处理灵活、易于实现各种参量的反馈等优点,在现代工业机器人技术中占有举足轻重的地位。
PID控制在生产过程中是一种最普遍的控制方法,在冶金、机械、化工等行业中获得广泛应用。实际中,对于电液伺服系统而言,传统PID控制算法能够很好的完成预定的控制要求。然而,PID控制器的参数很难一次确定下来,其参数的选取往往取决于经验,并且在实际中微调也比较困难。然而,利用模糊控制理论来自适应整定反馈控制律中的PID参数,它无需精确确定对象模型,只需将操作人员长期积累的经验知识用模糊规则模型化,然后运用模糊推理获得最优的控制参数,能够很好的克服这方面的不足。文献针对存在参数不确定性的电液位置伺服系统的跟踪控制问题,基于滑模控制理论,提出了一种具有参数自适应能力的自适应滑模控制方法。文献在不影响滑模变结构控制鲁棒性的情况下,在常规的滑模变结构控制中引入模糊自学习控制方法。
本文将以控制某型喷浆机器人的重要关节--枪杆旋转的电液位置伺服控制系统为研究对象,建立喷浆机器人枪杆的旋转电液位置伺服系统的数学模型,并设计了一种新的电液伺服系统的模糊自适应整定PID控制方法,把经典的PID控制与先进的模糊控制相结合,然后运用推理实现对PID参数的在线最佳调整。论文给出了控制算法的详细的设计过程和步骤,与传统PID控制相比,有效抑制了系统扰动和不确定性,提高了电液伺服系统的动态特性。
2 电液伺服系统模型
液压伺服系统一般由反馈测量元件、输入元件、转换放大装置、执行机构和控制对象五个部分组成。其典型的结构如图1所示: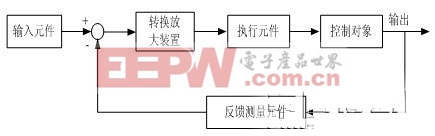
图1 液压伺服系统的构成
本设计以控制某型喷浆机器人枪杆旋转的电液位置伺服控制系统为研究对象,系统采用了电液伺服阀控制液压马达的控制方式,采用文献中模型,依据电液伺服阀液压控制回路实际情况,我们画出其控制系统框图如图2所示: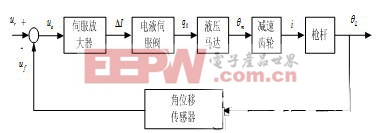
图2 控制系统方框图
根据系统的具体要求,选择合理的伺服放大器,伺服阀,液压马达,枪杆和传感器,计算确定各自的传递函数,根据各个环节的传递函数可以得到伺服系统的闭环传递函数为: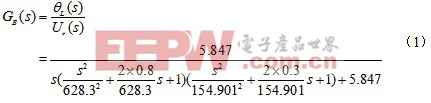
式中,![]() 为工作臂的转角,
为工作臂的转角,![]() 为输入控制信号。
为输入控制信号。
3 模糊自适应控制器设计
3.1 PID控制
在模拟控制系统中,控制器最常用的控制方式是PID控制。模拟PID控制系统原理框图如图3所示: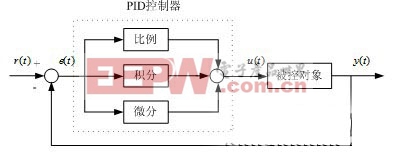
图3 PID控制系统原理框图
PID的控制率为:
3.2 模糊自适应PID控制
由于PID控制器参数很难一次确定下来,其参数的选取往往取决于经验,实际中采用试凑法进行PID参数整定时,过程繁杂.非常耗时,而且难得到最优的PID控制器参数。总而言之,PID控制器的参数整定需要经过大量的、反复的实验才能确定较优值。然而,利用模糊控制理论来自适应整定反馈控制律中的PID参数,它无需精确确定对象模型,只需将操作人员长期积累的经验知识用模糊理论控制规则模型化,然后运用模糊推理获得最优的控制参数。
因此,我们设计电液伺服系统模糊控制框图如图4所示: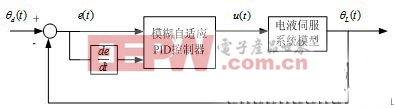
图4 模糊自适应PID电液伺服控制器
上图所示的控制系统是一个闭环反馈系统,误差![]() ,误差变化为
,误差变化为![]() ,输入信号为工作臂期望转角
,输入信号为工作臂期望转角![]() ,输出信号为工作臂实际转角
,输出信号为工作臂实际转角![]() ,
,![]() 是电液伺服系统的控制输入,也是模糊自适应控制器的输出。
是电液伺服系统的控制输入,也是模糊自适应控制器的输出。











评论