CANopen协议在现场总线网络中的应用

3.2 硬件部分
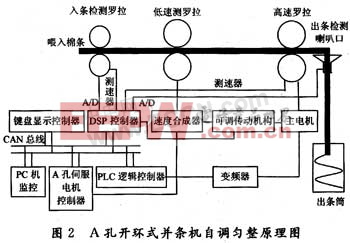
DSP 控制器部分为整个系统的核心,负责对整个通信网络进行信息采集、数据运算、工作控制。下面主要说明 DSP 控制器的 CANopen 协议实现。
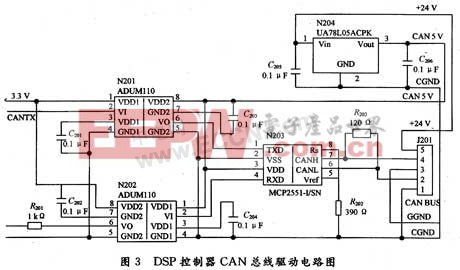
采用集成 CAN 模块的 TMS 320F 2810 DSP 实现,它有多达 32 个邮箱,占用 512 B RAM ,都可以配置为发送或接收邮箱,且都有一个可编程的接收屏蔽寄存器。这样就使数据传输更加方便灵活、信息量大大增加。图 3 为 DSP 控制器 CAN 总线部分驱动电路图,分别选用 TMS320F 2810 的 64 引脚 CANTXA 和 65 引脚 CANRXA 作为 CAN 总线的发送和接收引脚。采用 ADuM1100 高速数字隔离器替代传统的光电耦合器。采用 MCP2551 作为高速 CAN 收发器,具有差分发射和接收能力,可将许多节点与同一网络相连接。
3.3 软件部分
根据 CANopen 协议软件框架,分别设置了 NMT 报文、 SYNC 报文、 SDO 报文、 PDO 报文和 Heartbeat 报文,并针对 DSP 控制器从节点的性质及其与各节点之间的关系,设置了各报文的 COB - ID ,见表 3 。
在系统中键盘显示控制器为主节点,通过液晶显示监控各从节点信息,主节点通过检测 4 个从节点发送的周期性心跳报文 (Heartbeat) 来判断各个从节点的工作状态。图 4 为 DSP 控制器从节点的 CANopen 协议通讯流程:在系统上电后,首先向主节点发送 Boot-up 报文,通知主节点进入 Pre-operational 状态,等待主节点的 SDO 报文访问对象字典,在完成对象字典的配置后,等待接收主节点的 NMT 报文进入 Operational 状态,开始 PDO 报文的发送及接收,完成信息数据的交换,实现分布式网络控制。











评论