基于嵌入式的车辆偏离预警系统研究

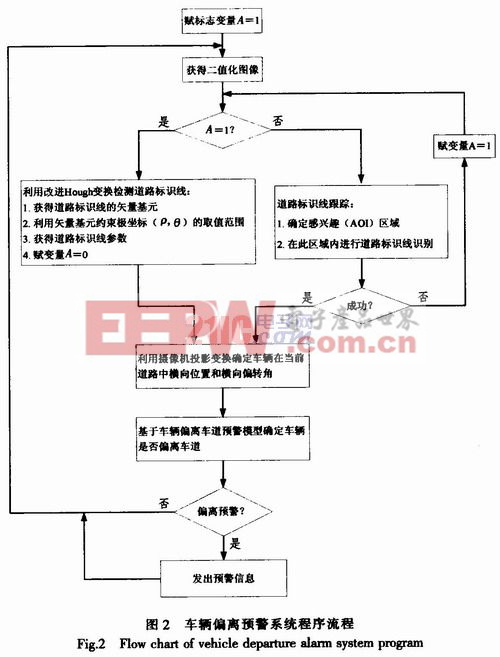
系统首先接收图像传感器传送过来的图像,将彩色图像转化为待处理的灰度图像,利用中值滤波、Sobel算子边缘检测、自适应阈值分割等图象处理的方法,消除噪声并平滑图像,经过边缘检测和图像分割获得二值化图像。在二值化图像和灰度图像基础上根据摄像机标定参数,通过模式识别对道路及道路标识线进行辨认,确定道路标线在整幅图像中的直线方程及本车在道路中的位置。依据车道偏离预警模型检查车辆是否在车道中正常行驶,是否偏离车道,并根据判断结果发出预警信息。软件流程图如图2所示。本文引用地址:https://www.eepw.com.cn/article/151368.htm
3.3 预警实验
实验车辆选用五菱之光6400C3加长版微型车,在高速公路及城市道路等结构化道路上进行道路标识线识别及车辆偏离预警试验。系统能够可靠地识别道路标识线,满足后续处理的需要,当车辆偏离车道时,该系统能够准确及时预警。例如系统某次报警发生时刻,车辆距道路标线距离为406 mm,横向偏转角为14.0°±2°,车速为85 km/h。
4 结束语
该设计是以嵌入式系统为平台,以图像传感器获取的道路信息为基础,提出基于车辆横向位置与横向分速度的车辆偏离车道预警模型,并进行了实验验证。实验表明,该方法能够准确分析车辆在车道中的位置信息,正确判断车辆的行驶状态,当车辆偏离车道时及时给予报警。








评论