基于嵌入式的车辆偏离预警系统研究

式中,kL与kR为左、右道路标识线在平面图像上的斜率,bL和bR为左、右道路标识线在v轴上的截距。结合图像传感器的安装高度以及镜头焦距等参数,可以获得车辆距道路标识线的横向距离及横向偏转角,如图l所示。本文引用地址:https://www.eepw.com.cn/article/151368.htm
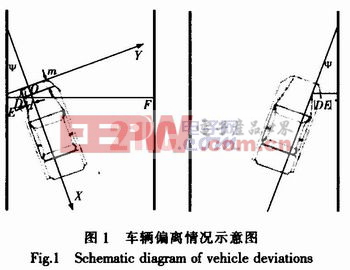
图l中,点0代表摄像机镜头中心在路面的垂直投影点,点D代表车辆的左前轮,点D与CCD摄像机镜头中心在汽车纵向平面及横向平面的距离分别为m,d,汽车纵向平面与道路标识线的夹角ψ称为横向偏转角。
车辆在车道中的位置采用左前车轮距左标线的横向距离|DE|或左前车轮距右标线的横向距离|DF|表示。或者采用右前车轮距右标线的横向距离|DE|’或右前车轮距右标线的横向距离|DF|’表示,则根据三角几何关系推导出的计算公式![]()
式中,bw为车辆轮距,BL、BR为左、右道路标线在Y轴上的截距,其值决定于道路标识线的空间方程。横向偏转角ψ表示汽车行驶过程相对于道路标识线的偏离方向,通过道路标识线空间方程计算得出,满足tanψ=-KL,KL为左道路标线的斜率。








评论