用感应器对BLDC电动机进行磁场定向控制

为什么选择FOC?
标量控制或六步转换进程是根据霍尔传感器输入(也可不采用传感器)控制BLDC电动机的传统方法,提供了动态反馈。只有在电动机达到下一位置时,它才给一对线圈通电,整流再进入下一步。如果实施方案采用感应器,则用霍尔传感器确定转子位置,电动机会相应整流。标量控制的优势在于其非常易于实施。一些高级标量控制方法使用电动机生成的back EMF确定转子的位置。但是,这种动态反馈不适用于周期内负载动态变化的应用。只有FOC这样的高级算法才能处理动态负载变化。
以下我们将介绍如何实施FOC控制算法。就本例而言,我们采用了赛普拉斯推出的PSoC 3。子系统分为以下几大模块:
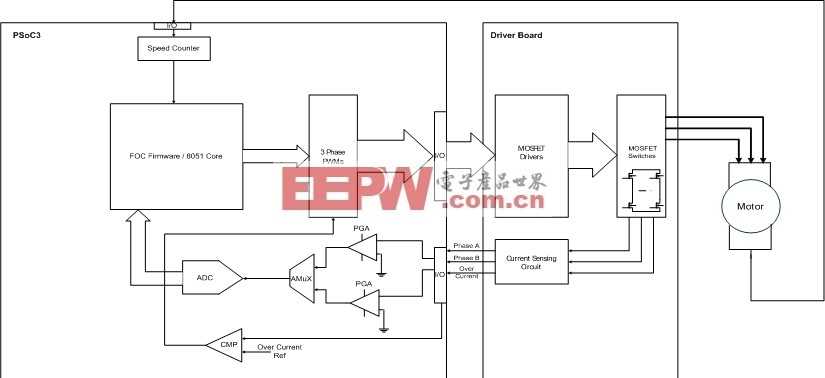
磁场定向控制算法的不同模块(采用赛普拉斯推出的PSoC 3实施)。
1. 电流重构模块
我们用双分流器法重构电流。利用这种方法,我们可测量两个分支电流,并用Kirchhoff电流定律重构第三个电流。PWM设计为中央对齐,每个FOC周期在PWM周期中央捕获两个电流样本。进行采样后,FOC即开始采样的ADC转换,并重构电流。
2. 克拉克和帕克转换
重构电流随后转换为双相定子参考,再通过克拉克和帕克转换分别转换为双相转子参考。转换完成后,转子参考中的电流就能调节满足适当的速度和扭矩要求。
克拉克转换
输入:Ia, Ib, Ic.
输出:Iα, Iβ
转换:Iα = Ia
Iβ = (Ia + 2 * Ib)/√3
帕克转换
输入:Iα, Iβ
输出:Id, Iq
转换:Id = Iα cos θ + Iβ sin θ
Iq = Iα sin θ + Iβ cos θ
3. PI调节器
我们实施增益可调的一般性PI控制器和最小最大饱和,以调节双相转子参考电流及电动机速度。
4. 逆变帕克和克拉克转换
调节后的输出随后再转换为三相参考(PWM工作周期),进而通过逆变帕克和克拉克转换)调节转子速度。
逆变帕克转换
输入:Vd, Vq
输出:Vα, Vβ
转换:Vα = Vd cos θ + Vq sin θ
Vβ = Vd sin θ + Vq cos θ
逆变克拉克转换
输入:Vα, Vβ
输出:Va, Vb, Vc
转换:Va = Vα
Vb = 1/2 * Vα + 2/√3 * Vβ
Vc = 1/2 * Vα - 2/√3 * Vβ
5. SVM(空间矢量调制)
空间矢量调制技术用于生成正弦波提供给定子线圈。根据逆变克拉克转换生成的三相参考,SVM生成的PWM比较值相位移120度。
![]()
![]()
其中:
tc, tb, ta à PWM比较寄存器值,表4.2。
T1 and T2 à 参见表1。
PWMperiod àPWM周期数。
表1. 查询T1和T2的搜索表
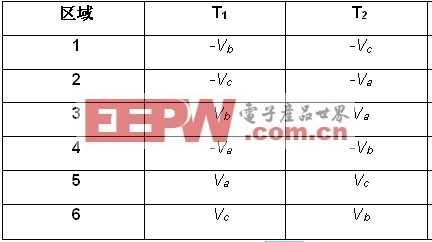
区域T1T2
1-Vb-Vc
2-Vc-Va
3VbVa
4-Va-Vb
5VaVc
6VcVb
其中:
Va, Vb and Vc à 逆变克拉克转换输出。
根据以下标准决定区域:
如果Va > 0,则Sector_bit_0 = 1,否则为0。
如果Vb > 0,则Sector_bit_1 = 1,否则为0。
如果Vc > 0,则Sector_bit_2 = 1,否则为0。
表2:分配PWM工作周期的搜索表

区域123456
PWM_Atbtatatctctb
PWM_Btatctbtbtatc
PWM_Ctctbtctatbta
速度和位置感应
首先,我们检测一个霍尔传感器输入两个上升或下降边缘之间的周期来测出速度。检测的周期实际就是一个电子周期,是电子频率或速度逆变所得。电子速度值在每个FOC周期上累加,就计算出位置“Θ”。在本例中,FOC周期为200µS。我们用以下关系:
Θ = ωt
Θ à 角距为“t”秒
ω à 角速度
t à Θ计算时间间隔
位置Θ还能用编码器输入替代霍尔传感器来计算。我们不用累加速度,可直接获得位置信息。
FOC带来了出色的高效性和节能性,利用这种控制技术驱动电动机、满足实际需求,可大幅节约成本。此外,利用PSoC 3这种SoC的灵活性优势、丰富资源和小型化架构,包括硬件在内的整个控制算法(不含驱动器板)都能在单芯片中加以实施。

电动机相关文章:电动机工作原理设计
霍尔传感器相关文章:霍尔传感器工作原理
霍尔传感器相关文章:霍尔传感器原理 矢量控制相关文章:矢量控制原理











评论